15.2. Task algorithm “InterpolationByReducedModelTask”¶
Warning
In this particular version, this algorithm or some of its variants are experimental, and therefore remain subject to change in future versions.
This algorithm is reserved for use in the textual user interface (TUI), and therefore not in graphical user interface (GUI).
15.2.1. Description¶
This algorithm enables highly efficient interpolation of physical measurements
using a reduced representation of the model for that physics. The output, for
each set of measurements supplied at the required positions, is a complete
field  by interpolation. Put another way, it’s a physical
field reconstruction using measurements and a reduced numerical model.
by interpolation. Put another way, it’s a physical
field reconstruction using measurements and a reduced numerical model.
To interpolate these measurements, a method of Empirical Interpolation Method (EIM [Barrault04]) type is used, which uses a reduced model of type Reduced Order Model (ROM) issued from EIM or DEIM decomposition, with or without measurement positioning constraints.
To use this algorithm, you need the optimally positioned measurements and the associated reduced basis for model representation. This can be achieved as described below, by means of a preliminary analysis using a MOP, which provides positions and base. Once the base has been constructed and the positions determined, it is possible to perform as many interpolations as there are sets of measurements at the required positions, without having to repeat the prior analysis.
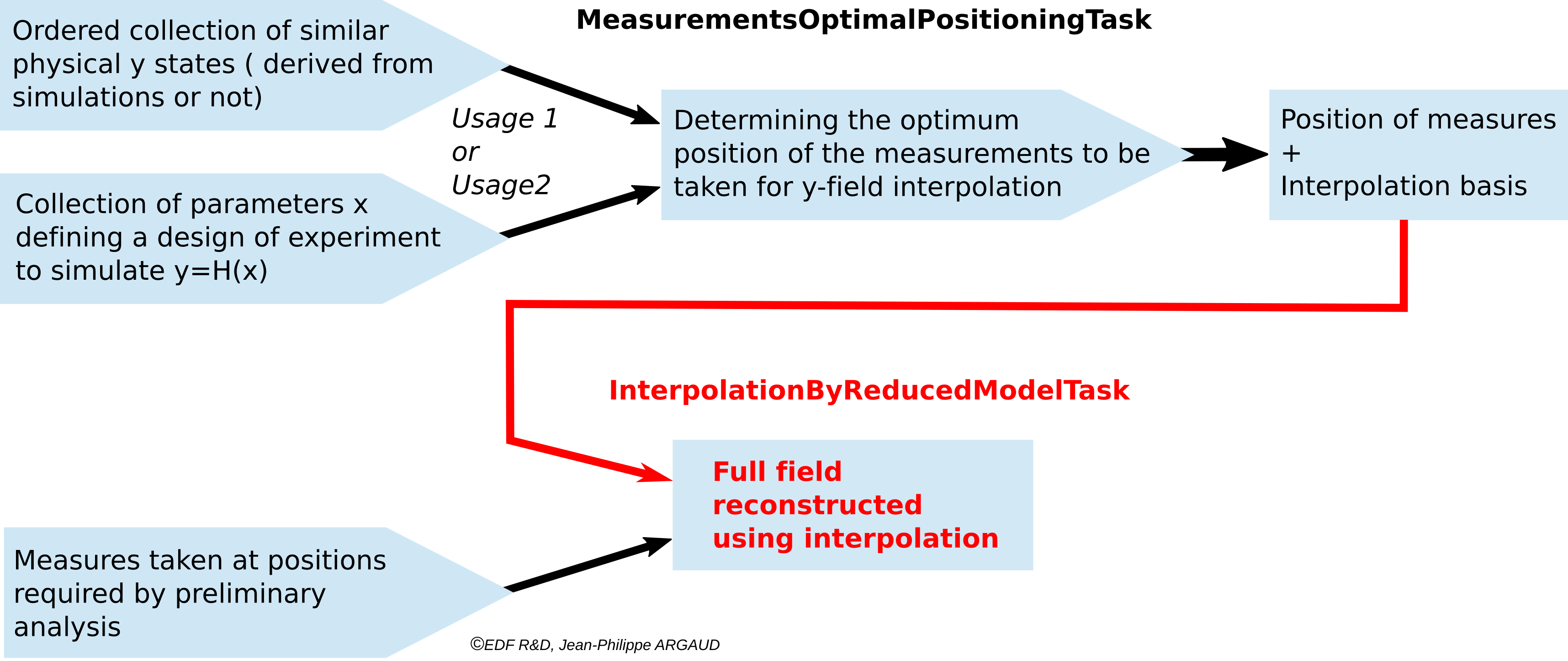
General scheme for using the algorithm
15.2.2. Some noteworthy properties of the implemented methods¶
To complete the description, we summarize here a few notable properties of the algorithm methods or of their implementations. These properties may have an influence on how it is used or on its computational performance. For further information, please refer to the more comprehensive references given at the end of this algorithm description.
The methods proposed by this algorithm do not require derivation of the objective function or of one of the operators, thus avoiding this additional calculation time when derivatives are calculated numerically by multiple evaluations.
15.2.3. Optional and required commands¶
The general required commands, available in the editing user graphical or textual interface, are the following:
- Observation
List of vectors. The variable indicates the observation vector used for data assimilation or optimization, and usually noted
 .
Its value is defined as an object of type “Vector” if it is a single
observation (temporal or not) or “VectorSeries” if it is a succession of
observations. Its availability in output is conditioned by the boolean
“Stored” associated in input.
.
Its value is defined as an object of type “Vector” if it is a single
observation (temporal or not) or “VectorSeries” if it is a succession of
observations. Its availability in output is conditioned by the boolean
“Stored” associated in input.
The general optional commands, available in the editing user graphical or textual interface, are indicated in List of commands and keywords for a dedicated task or study oriented case. Moreover, the parameters of the command “AlgorithmParameters” allow to choose the specific options, described hereafter, of the algorithm. See Description of options of an algorithm by “AlgorithmParameters” for the good use of this command.
The options are the following:
- ObservationsAlreadyRestrictedOnOptimalLocations
Boolean value. The variable defines whether measurements are supplied only at the ideal positions or optimum points at which a measurement is required (“True”, default value), or whether they are supplied on a medium identical to the complete field and must therefore be restricted to the required positions (“False”).
Example :
{"ObservationsAlreadyRestrictedOnOptimalLocations":False}
- OptimalLocations
Integer series. This series contains the indices of ideal positions or optimal points where a measurement is required, in the order of the variables of a state vector considered arbitrarily in one-dimensional form, and in the same order as the vectors of the reduced basis found iteratively.
It is identical to a single output (one single series) of the ideal positions or optimum points (which is a list of integer series) of a Task algorithm “MeasurementsOptimalPositioningTask”.
- ReducedBasis
List of matrix. Each element is a matrix, containing in each column a vector of the reduced basis obtained by the optimal search, ordered by decreasing preference and in the same order as the ideal points found iteratively.
When it is an input, it is identical to a single output of a Task algorithm “MeasurementsOptimalPositioningTask”.
Example :
rb = ADD.get("ReducedBasis")[-1]- StoreSupplementaryCalculations
List of names. This list indicates the names of the supplementary variables, that can be available during or at the end of the algorithm, if they are initially required by the user. Their availability involves, potentially, costly calculations or memory consumptions. The default is then a void list, none of these variables being calculated and stored by default (excepted the unconditional variables). The possible names are in the following list (the detailed description of each named variable is given in the following part of this specific algorithmic documentation, in the sub-section “Information and variables available at the end of the algorithm”): [ “Analysis”, “ReducedCoordinates”, ].
Example :
{"StoreSupplementaryCalculations":["CurrentState", "Residu"]}
15.2.4. Information and variables available at the end of the algorithm¶
At the output, after executing the algorithm, there are information and
variables originating from the calculation. The description of
Variables and information available at the output show the way to obtain them by the method
named get, of the variable “ADD” of the post-processing in graphical
interface, or of the case in textual interface. The input variables, available
to the user at the output in order to facilitate the writing of post-processing
procedures, are described in an Inventory of potentially available information at the output.
Permanent outputs (non conditional)
The unconditional outputs of the algorithm are the following:
- Analysis
List of vectors. Each element of this variable is an optimal state
 in optimization, an interpolate or an analysis
in optimization, an interpolate or an analysis
 in data assimilation.
in data assimilation.Example:
xa = ADD.get("Analysis")[-1]
Set of on-demand outputs (conditional or not)
The whole set of algorithm outputs (conditional or not), sorted by alphabetical order, is the following:
- Analysis
List of vectors. Each element of this variable is an optimal state
in optimization, an interpolate or an analysis
in data assimilation.Example:
xa = ADD.get("Analysis")[-1]
- ReducedCoordinates
List of vectors. Each element of this variable contains the coordinates of a complete physical state
in the reduced basis.Example:
rc = ADD.get("ReducedCoordinates")[-1]
15.2.5. Python (TUI) use examples¶
Here is one or more very simple examples of the proposed algorithm and its parameters, written in [DocR] Textual User Interface for ADAO (TUI/API). Moreover, when it is possible, the information given as input also allows to define an equivalent case in [DocR] Graphical User Interface for ADAO (GUI/EFICAS).
15.2.5.1. First example¶
This example describes the implementation of a reconstruction by interpolation, following the building of a reduced representation by an optimal measurement positioning search.
To illustrate, we use the same very simple artificial fields (generated in such a way as to exist in a vector space of dimension 2) that for the study examples with “MeasurementsOptimalPositioningTask”. The preliminary positioning ADAO search yields 2 optimal positions for the measurements, which are then used to establish a physical field interpolation based on measurements at the optimum locations.
# -*- coding: utf-8 -*-
#
from numpy import array, arange, ravel, set_printoptions
set_printoptions(precision=3)
#
dimension = 7
#
print("Defining a set of artificial physical fields")
print("--------------------------------------------")
Ensemble = array( [i+arange(dimension) for i in range(7)] ).T
print("- Dimension of physical field space....................: %i"%dimension)
print("- Number of physical field vectors.....................: %i"%Ensemble.shape[1])
print()
#
print("Search for optimal measurement positions")
print("-------------------------------------------")
from adao import adaoBuilder
case = adaoBuilder.New()
case.setAlgorithmParameters(
Algorithm = "MeasurementsOptimalPositioningTask",
Parameters = {
"EnsembleOfSnapshots":Ensemble,
"MaximumNumberOfLocations":3,
"ErrorNorm":"L2",
"StoreSupplementaryCalculations":[
"ReducedBasis",
"Residus",
],
}
)
case.execute()
print("- ADAO calculation performed")
print()
#
print("Display of optimal positioning of measures")
print("------------------------------------------")
op = case.get("OptimalPoints")[-1]
print("- Number of optimal measurement positions..............: %i"%op.size)
print("- Optimal measurement positions, numbered by default...: %s"%op)
print()
#
print("Reconstruction by interpolation of known measured states")
print("--------------------------------------------------------")
rb = case.get("ReducedBasis")[-1]
measures_at_op = Ensemble[op,1]
#
interpolation = adaoBuilder.New()
interpolation.setAlgorithmParameters(
Algorithm = "InterpolationByReducedModelTask",
Parameters = {
"ReducedBasis":rb,
"OptimalLocations":op,
}
)
interpolation.setObservation( Vector = measures_at_op )
interpolation.execute()
field = interpolation.get("Analysis")[-1]
print("- Reference state 1 used for the learning..............:",ravel(Ensemble[:,1]))
print("- Optimal measurement positions, numbered by default...: %s"%op)
print("- Measures extracted from state 1 for reconstruction...:",measures_at_op)
print("- State 1 reconstructed with the precision of 1%.......:",field)
if max(abs(ravel(Ensemble[:,1])-field)) < 1.e-2:
print(" ===> There is no difference between the two states, as expected")
else:
raise ValueError("Difference recorded in reference state 1")
print()
#
print("Reconstruction by interpolation of unknown measured states")
print("----------------------------------------------------------")
measures_at_op = array([4, 3])
interpolation.setObservation( Vector = measures_at_op )
interpolation.execute()
field = interpolation.get("Analysis")[-1]
print(" Illustration of an interpolation on unknown real measurements")
print("- Optimal measurement positions, numbered by default...: %s"%op)
print("- Measures not present in the known states.............:",measures_at_op)
print("- State reconstructed with the precision of 1%.........:",field)
print(" ===> At measure positions %s, the reconstructed field is equal to measures"%op)
print()
The execution result is the following:
Defining a set of artificial physical fields
--------------------------------------------
- Dimension of physical field space....................: 7
- Number of physical field vectors.....................: 7
Search for optimal measurement positions
-------------------------------------------
- ADAO calculation performed
Display of optimal positioning of measures
------------------------------------------
- Number of optimal measurement positions..............: 2
- Optimal measurement positions, numbered by default...: [6 0]
Reconstruction by interpolation of known measured states
--------------------------------------------------------
- Reference state 1 used for the learning..............: [1 2 3 4 5 6 7]
- Optimal measurement positions, numbered by default...: [6 0]
- Measures extracted from state 1 for reconstruction...: [7 1]
- State 1 reconstructed with the precision of 1%.......: [1. 2. 3. 4. 5. 6. 7.]
===> There is no difference between the two states, as expected
Reconstruction by interpolation of unknown measured states
----------------------------------------------------------
Illustration of an interpolation on unknown real measurements
- Optimal measurement positions, numbered by default...: [6 0]
- Measures not present in the known states.............: [4 3]
- State reconstructed with the precision of 1%.........: [3. 3.167 3.333 3.5 3.667 3.833 4. ]
===> At measure positions [6 0], the reconstructed field is equal to measures