15.3. Task algorithm “MeasurementsOptimalPositioningTask”¶
This algorithm is reserved for use in the textual user interface (TUI), and therefore not in graphical user interface (GUI).
15.3.1. Description¶
This algorithm provides optimal positioning of measurements of an
 physical field, in order to get the best possible
interpolation. These optimal measurement positions are determined in an
iterative greedy way, from a pre-existing set of state vectors
(usually called “snapshots*” in reduced basis methodology)
or obtained by simulating the physical field(s) of interest during the course
of the algorithm. Each of these state vectors is usually (but not necessarily)
the result of a simulation using the operator
physical field, in order to get the best possible
interpolation. These optimal measurement positions are determined in an
iterative greedy way, from a pre-existing set of state vectors
(usually called “snapshots*” in reduced basis methodology)
or obtained by simulating the physical field(s) of interest during the course
of the algorithm. Each of these state vectors is usually (but not necessarily)
the result of a simulation using the operator  that
returns the complete field(s) for a given set of parameters
that
returns the complete field(s) for a given set of parameters  ,
or of an explicit observation of the complete field(s) .
,
or of an explicit observation of the complete field(s) .
To determine the optimum positioning of measurements, an Empirical
Interpolation Method (EIM [Barrault04]) or Discrete Empirical Interpolation
Method (DEIM [Chaturantabut10]) is used, which establishes a reduced model of
type Reduced Order Model (ROM), with (variant “lcEIM” or “lcDEIM”) or
without (variant “EIM” or “DEIM”) positioning constraints. Technically,
these methods build an approximation of the state in a
reduced-dimensional space, using a set of special interpolation points to
optimally represent the global behavior of the field. For
performance, we recommend using the variant “lcEIM” or “EIM” when the
dimension of the full fields space is large.
There are two ways to use this algorithm:
In its simplest use, if the set of physical state
vectors
is pre-existing, it is only necessary to provide it as an ordered collection
by the algorithm option “EnsembleOfSnapshots”. This is the default
situation, for example, if the set of states has been generated by an
Task algorithm “EnsembleOfSimulationGenerationTask”.If the set of physical state
vectors is to be obtained by
explicit simulations during the course of the algorithm, then one must
provide both the simulation operator of the complete field, here identified
with the observation operator of the complete field, and the
design of experiment of the space of parametric states .
If the design of experiments is supplied, the sampling of the states
can be given as in the
Task algorithm “EnsembleOfSimulationGenerationTask”, explicitly or
under form of hypercubes, explicit or sampled according to classic
distributions, or using Latin hypercube sampling (LHS) or Sobol sequences. The
computations are optimized according to the computer resources available and
the options requested by the user. You can refer to the
Requirements for describing a state sampling for an illustration of sampling.
Beware of the size of the hypercube (and then to the number of computations)
that can be reached, it can grow quickly to be quite large. The memory required
is then the product of the size of an individual state and
the size of the hypercube.

General scheme for using the algorithm
It is possible to exclude a priori potential positions for measurement positioning, using the analysis variant “lcEIM” or “lcDEIM” for a constrained positioning search.
15.3.2. Some noteworthy properties of the implemented methods¶
To complete the description, we summarize here a few notable properties of the algorithm methods or of their implementations. These properties may have an influence on how it is used or on its computational performance. For further information, please refer to the more comprehensive references given at the end of this algorithm description.
The methods proposed by this algorithm do not require derivation of the objective function or of one of the operators, thus avoiding this additional calculation time when derivatives are calculated numerically by multiple evaluations.
The methods proposed by this algorithm have internal parallelism, and can therefore take advantage of computational distribution resources. The potential interaction, between the parallelism of the numerical derivation, and the parallelism that may be present in the observation or evolution operators embedding user codes, must therefore be carefully tuned.
15.3.3. Optional and required commands¶
The general required commands, available in the editing user graphical or textual interface, are the following:
None
The general optional commands, available in the editing user graphical or textual interface, are indicated in List of commands and keywords for a dedicated task or study oriented case. Moreover, the parameters of the command “AlgorithmParameters” allow to choose the specific options, described hereafter, of the algorithm. See Description of options of an algorithm by “AlgorithmParameters” for the good use of this command.
The options are the following:
- EnsembleOfSnapshots
List of vectors or matrix. This key contains an ordered collection of physical state vectors
, called “snapshots” in reduced
basis terminology. At each step index, there is 1 state per column if this
list is in matrix form, or 1 state per element if it’s actually a list.
Caution: the numbering of the support or points, on which or to which a state
value is given in each vector, is implicitly that of the natural order of
numbering of the state vector, from 0 to the “size minus 1” of this vector.Example :
{"EnsembleOfSnapshots":[y1, y2, y3...]}
- ExcludeLocations
List of integers or names. This key specifies the list of points in the state vector excluded from the optimal search. The default value is an empty list. The list can contain either indices of points (in the implicit internal order of a state vector) or names of points (which must exist in the list of position names indicated by the keyword “NameOfLocations” in order to be excluded). By default, if the elements of the list are strings that can be assimilated to indices, then these strings are indeed considered as indices and not names.
Important notice: the numbering of these excluded points must be identical to that adopted, implicitly and imperatively, by the variables constituting a state considered arbitrarily in one-dimensional form.
Example :
{"ExcludeLocations":[3, 125, 286]}or{"ExcludeLocations":["Point3", "XgTaC"]}
- ErrorNorm
Predefined name. This key indicates the norm used for the residue that controls the optimal search. The default is the “L2” norm. The possible criteria are in the following list: [“L2”, “Linf”].
Example :
{"ErrorNorm":"L2"}
- ErrorNormTolerance
Real value. This key specifies the value at which the residual associated with the approximation is acceptable, which leads to stop the optimal search. The default value is 1.e-7 (which is usually equivalent to almost no stopping criterion because the approximation is less precise), and it is recommended to adapt it to the needs for real problems. A usual value, recommended to stop the search on residual criterion, is 1.e-2.
Example :
{"ErrorNormTolerance":1.e-7}
- MaximumNumberOfLocations
Integer value. This key specifies the maximum possible number of positions found in the optimal search. The default value is 1. The optimal search may eventually find less positions than required by this key, as for example in the case where the residual associated to the approximation is lower than the criterion and leads to the early termination of the optimal search. It is recommended to adapt this parameter to the needs on real problems.
Example :
{"MaximumNumberOfLocations":5}
- NameOfLocations
List of names. This key indicates an explicit list of variable names or positions, positioned as in a state vector considered arbitrarily in one-dimensional form. The default value is an empty list. To be used, this list must have the same length as that of a physical state.
Important notice: the order of the names is, implicitly and imperatively, the same as that of the variables constituting a state considered arbitrarily in one-dimensional form.
Example :
{"NameOfLocations":["Point3", "Location42", "Position125", "XgTaC"]}
- ReduceMemoryUse
Boolean value. The variable leads to the activation, or not, of the memory footprint reduction mode at runtime, at the cost of a potential increase in calculation time. Results may differ above a certain precision (1.e-12 to 1.e-14), usually close to machine precision (1.e-16). The default is “False”, the choices are “True” or “False”.
Example:
{"ReduceMemoryUse":False}
- SampleAsExplicitHyperCube
List of list of real values. This key describes the calculations points as an hyper-cube, from a given list of explicit sampling of each variable as a list. That is then a list of lists, each of them being potentially of different size. By nature, the points are included in the domain defined by the bounds of the explicit lists for each variable.
Example :
{"SampleAsExplicitHyperCube":[[0.,0.25,0.5,0.75,1.], [-2,2,1]]}for a state space of dimension 2.
- SampleAsIndependentRandomVariables
List of triplets [Name, Parameters, Number]. This key describes the calculations points as an hyper-cube, for which the points on each axis come from a independent random sampling of the axis variable, under the specification of the distribution, its parameters and the number of points in the sample, as a list [Name, Parameters, Number] for each axis. Unlike sampling described by the keyword “SampleAsIndependentRandomVectors”, points are explicitly distributed over a regular hypercube. The possible distribution names are ‘normal’ of parameters (mean,std), ‘lognormal’ of parameters (mean,sigma), ‘uniform’ of parameters (low,high), or ‘weibull’ of parameter (shape). That is then a list of the same size than the one of the state. By nature, the points are included in the unbounded or bounded domain, depending on the characteristics of the distributions chosen for each variable.
Example :
{"SampleAsIndependentRandomVariables":[['normal',[0.,1.],3], ['uniform',[-2,2],4]]}for a state space of dimension 2.
- SampleAsIndependentRandomVectors
List of pairs [Name, Parameters], plus [Dimension, Number]. This key describes the calculation points in the form of particular distributions defined for each dimension, resulting in random vectors whose individual components follow the required distribution. Unlike the sampling described by the keyword “SampleAsIndependentRandomVariables”, the points are not distributed over a regular hypercube. The distribution on each axis variable is specified by its name and parameters, in the form of a list [Name, Parameters] for each axis. This list of pairs, whose number is identical to the size of the state space, is completed by a pair of integers [Dimension, Number] containing the dimension of the state space and the desired number of sampling points. Possible distribution names are ‘normal’ with parameters (mean,std), ‘lognormal’ with parameters (mean,sigma), ‘uniform’ with parameters (low,high), ‘loguniform’ with parameters (low,high), or ‘weibull’ with parameters (shape). By their very nature, points are included in the unbounded or bounded domain, depending on the characteristics of the distributions chosen for each variable. Distributions can be different for each axis.
Example :
{"SampleAsIndependentRandomVectors":[['normal',[0.,1.]], ['uniform',[-2,2]]]}for a state space of dimension 2.
- SampleAsMinMaxLatinHyperCube
List of real valued pairs [Min, Max], plus [Dimension, Number]. This key describes the bounded domain in which the calculations points will be placed, from a [Min, Max] pair for each state component. The lower bounds are included. This list of pairs, identical in number to the size of the state space, is augmented by a pair of integers [Dimension, Number] containing the dimension of the state space and the desired number of sample points. Sampling is then automatically constructed using the Latin hypercube method (LHS). By nature, the points are included in the domain defined by the explicit bounds.
Example :
{"SampleAsMinMaxLatinHyperCube":[[0.,1.],[-1,3]]+[[2,11]]}for a state space of dimension 2 and for 11 sampling points.
- SampleAsMinMaxSobolSequence
List of real valued pairs [Min, Max], plus [Dimension, Number]. This key describes the bounded domain in which the calculations points will be placed, from a [Min, Max] pair for each state component. The lower bounds are included. This list of pairs, identical in number to the size of the state space, is augmented by a pair of integers [Dimension, Number] containing the dimension of the state space and the minimum desired number of sample points (by construction, the number of points generated in the Sobol sequence will be the power of 2 immediately above this minimum number). Sampling is then automatically constructed using the Sobol sequence method. By nature, the points are included in the domain defined by the explicit bounds.
Remark: it is required to have Scipy version 1.7.0 or higher to use this sampling option.
Example :
{"SampleAsMinMaxSobolSequence":[[0.,1.],[-1,3]]+[[2,11]]}for a state space of dimension 2 and 11 sampling points (there will be 16 points in practice).
- SampleAsMinMaxStepHyperCube
List of triplets of real values [Min, Max, Step]. This key describes the calculations points as an hyper-cube, from a given list of implicit sampling of each variable by a triplet [Min, Max, Step]. That is then a list of the same size than the one of the state. The bounds are included. By nature, the points are included in the domain defined by the explicit bounds.
Example :
{"SampleAsMinMaxStepHyperCube":[[0.,1.,0.25],[-1,3,1]]}for a state space of dimension 2.
- SampleAsnUplet
List of states. This key describes the calculations points as a list of n-uplets, each n-uplet being a state. By nature, points are included in the bounded domain defined as the convex envelope of explicitly designated points.
Example :
{"SampleAsnUplet":[[0,1,2,3],[4,3,2,1],[-2,3,-4,5]]}for 3 points in a state space of dimension 4.
- SetDebug
Boolean value. This variable leads to the activation, or not, of the debug mode during the function or operator evaluation. The default is “False”, the choices are “True” or “False”.
Example:
{"SetDebug":False}
- SetSeed
Integer value. This key allow to give an integer in order to fix the seed of the random generator used in the algorithm. By default, the seed is left uninitialized, and so use the default initialization from the computer, which then change at each study. To ensure the reproducibility of results involving random samples, it is strongly advised to initialize the seed. A simple convenient value is for example 123456789. It is recommended to put an integer with more than 6 or 7 digits to properly initialize the random generator.
Example:
{"SetSeed":123456789}- StoreSupplementaryCalculations
List of names. This list indicates the names of the supplementary variables, that can be available during or at the end of the algorithm, if they are initially required by the user. Their availability involves, potentially, costly calculations or memory consumptions. The default is then a void list, none of these variables being calculated and stored by default (excepted the unconditional variables). The possible names are in the following list (the detailed description of each named variable is given in the following part of this specific algorithmic documentation, in the sub-section “Information and variables available at the end of the algorithm”): [ “EnsembleOfSimulations”, “EnsembleOfStates”, “ExcludedPoints”, “OptimalPoints”, “ReducedBasis”, “ReducedBasisMus”, “Residus”, “SingularValues”, ].
Example :
{"StoreSupplementaryCalculations":["CurrentState", "Residu"]}
- Variant
Predefined name. This key allows to choose one of the possible variants for the optimal positioning search. The default variant is the constrained by excluded locations “lcEIM” or “PositioningBylcEIM”, and the possible choices are “EIM” or “PositioningByEIM” (using the original EIM algorithm), “lcEIM” or “PositioningBylcEIM” (using the constrained by excluded locations EIM, named “Location Constrained EIM”), “DEIM” or “PositioningByDEIM” (using the original DEIM algorithm), “lcDEIM” or “PositioningBylcDEIM” (using the constrained by excluded locations DEIM, named “Location Constrained DEIM”). It is highly recommended to keep the default value.
Example :
{"Variant":"lcEIM"}
15.3.4. Information and variables available at the end of the algorithm¶
At the output, after executing the algorithm, there are information and
variables originating from the calculation. The description of
Variables and information available at the output show the way to obtain them by the method
named get, of the variable “ADD” of the post-processing in graphical
interface, or of the case in textual interface. The input variables, available
to the user at the output in order to facilitate the writing of post-processing
procedures, are described in an Inventory of potentially available information at the output.
Permanent outputs (non conditional)
The unconditional outputs of the algorithm are the following:
- OptimalPoints
List of integer series. Each element is a series, containing the indices of ideal positions or optimal points where a measurement is required, determined by the optimal search, ordered by decreasing preference and in the same order as the vectors iteratively found to form the reduced basis.
Example :
op = ADD.get("OptimalPoints")[-1]
Set of on-demand outputs (conditional or not)
The whole set of algorithm outputs (conditional or not), sorted by alphabetical order, is the following:
- EnsembleOfSimulations
List of vectors or matrix. This key contains an ordered collection of physical state vectors or simulated state vectors
that may
be observed. These are operator outputs, i.e. simulated
observation states (called “snapshots” in reduced-base terminology). At
each step index, there is 1 state per column if this list is in matrix form,
or 1 state per element if it’s actually a list. Caution: the numbering of the
support or points, on which or to which a state value is given in each
vector, is implicitly that of the natural order of numbering of the state
vector, from 0 to the “size minus 1” of this vector.Example :
{"EnsembleOfSimulations":[y1, y2, y3...]}
- EnsembleOfStates
List of vectors or matrix. Each element is an ordered collection of physical or parameter state vectors
. These are
operator entries, i.e. current states before observation. At each step
index, there is 1 state per column if this list is in matrix form, or 1 state
per element if it’s actually a list. Caution: the numbering of the support or
points, on which or to which a state value is given in each vector, is
implicitly that of the natural order of numbering of the state vector, from 0
to the “size minus 1” of this vector.Example :
{"EnsembleOfStates":[x1, x2, x3...]}
- ExcludedPoints
List of integer series. Each element is a series, containing the indices of the points excluded from the optimal search, according to the order of the variables of a state vector considered arbitrarily in one-dimensional form.
Example :
ep = ADD.get("ExcludedPoints")[-1]
- OptimalPoints
List of integer series. Each element is a series, containing the indices of ideal positions or optimal points where a measurement is required, determined by the optimal search, ordered by decreasing preference and in the same order as the vectors iteratively found to form the reduced basis.
Example :
op = ADD.get("OptimalPoints")[-1]
- ReducedBasis
List of matrix. Each element is a matrix, containing in each column a vector of the reduced basis obtained by the optimal search, ordered by decreasing preference and in the same order as the ideal points found iteratively.
When it is an input, it is identical to a single output of a Task algorithm “MeasurementsOptimalPositioningTask”.
Example :
rb = ADD.get("ReducedBasis")[-1]
- ReducedBasisMus
List of integer series. Each element is a series, containing the indices of the
 parameters characterizing a state, in the order chosen during
the iterative search process for vectors of the reduced basis.
parameters characterizing a state, in the order chosen during
the iterative search process for vectors of the reduced basis.Example :
op = ADD.get("ReducedBasisMus")[-1]
- Residus
List of real value series. Each element is a series, containing the values of the particular residue checked during the running of the algorithm.
Example :
rs = ADD.get("Residus")[-1]
- SingularValues
List of real value series. Each element is a series, containing the singular values obtained through a SVD decomposition of a collection of full state vectors. The number of singular values is not limited by the requested size of the reduced basis.
Example :
sv = ADD.get("SingularValues")[-1]
15.3.5. Python (TUI) use examples¶
Here is one or more very simple examples of the proposed algorithm and its parameters, written in [DocR] Textual User Interface for ADAO (TUI/API). Moreover, when it is possible, the information given as input also allows to define an equivalent case in [DocR] Graphical User Interface for ADAO (GUI/EFICAS).
15.3.5.1. First example¶
This example describes the implementation of a search for optimal measurement positioning. To illustrate, we construct a very simple artificial collection of physical fields (generated here so as to exist in a vector space of dimension 2). The default ADAO search then easily yields 2 optimal positions for the measurements, as illustrated by the display at the end of the script.
# -*- coding: utf-8 -*-
#
from numpy import array, arange
#
dimension = 7
#
print("Defining a set of artificial physical fields")
print("--------------------------------------------")
Ensemble = array( [i+arange(dimension) for i in range(7)] ).T
print("- Dimension of physical field space....................: %i"%dimension)
print("- Number of physical field vectors.....................: %i"%Ensemble.shape[1])
print("- Collection of physical fields (one per column)")
print(Ensemble)
print()
#
print("Search for optimal measurement positions")
print("-------------------------------------------")
from adao import adaoBuilder
case = adaoBuilder.New()
case.setAlgorithmParameters(
Algorithm = "MeasurementsOptimalPositioningTask",
Parameters = {
"EnsembleOfSnapshots":Ensemble,
"MaximumNumberOfLocations":3,
"ErrorNorm":"L2",
}
)
case.execute()
print("- ADAO calculation performed")
print()
#
print("Display the optimal positioning of measures")
print("-------------------------------------------")
op = case.get("OptimalPoints")[-1]
print("- Number of optimal measurement positions..............: %i"%op.size)
print("- Optimal measurement positions, numbered by default...: %s"%op)
print()
The execution result is the following:
Defining a set of artificial physical fields
--------------------------------------------
- Dimension of physical field space....................: 7
- Number of physical field vectors.....................: 7
- Collection of physical fields (one per column)
[[ 0 1 2 3 4 5 6]
[ 1 2 3 4 5 6 7]
[ 2 3 4 5 6 7 8]
[ 3 4 5 6 7 8 9]
[ 4 5 6 7 8 9 10]
[ 5 6 7 8 9 10 11]
[ 6 7 8 9 10 11 12]]
Search for optimal measurement positions
-------------------------------------------
- ADAO calculation performed
Display the optimal positioning of measures
-------------------------------------------
- Number of optimal measurement positions..............: 2
- Optimal measurement positions, numbered by default...: [6 0]
15.3.5.2. Second example¶
This example describes the same optimal positioning of measurements, followed by an analysis of the reduced representation and errors obtained during the search for optimal positions.
The initial part of the script is identical to the previous one, with the same artificial collection of physical fields and the same analysis by ADAO. We then add the recovery of the reduced base and a very simple example of decomposition on the reduced base, exact in this simple case, of one of the physical fields initially provided.
# -*- coding: utf-8 -*-
#
from numpy import array, arange
#
dimension = 7
#
print("Defining a set of artificial physical fields")
print("--------------------------------------------")
Ensemble = array( [i+arange(dimension) for i in range(7)] ).T
print("- Dimension of physical field space....................: %i"%dimension)
print("- Number of physical field vectors.....................: %i"%Ensemble.shape[1])
print("- Collection of physical fields (one per column)")
print(Ensemble)
print()
#
print("Search for optimal measurement positions")
print("-------------------------------------------")
from adao import adaoBuilder
case = adaoBuilder.New()
case.setAlgorithmParameters(
Algorithm = "MeasurementsOptimalPositioningTask",
Parameters = {
"EnsembleOfSnapshots":Ensemble,
"MaximumNumberOfLocations":3,
"ErrorNorm":"L2",
"StoreSupplementaryCalculations":[
"ReducedBasis",
"Residus",
],
}
)
case.execute()
print("- ADAO calculation performed")
print()
#
print("Display the optimal positioning of measures")
print("-------------------------------------------")
op = case.get("OptimalPoints")[-1]
print("- Number of optimal measurement positions..............: %i"%op.size)
print("- Optimal measurement positions, numbered by default...: %s"%op)
print()
#
print("Reduced representation and error information")
print("--------------------------------------------")
rb = case.get("ReducedBasis")[-1]
print("- Number of vectors of the reduced basis...............: %i"%rb.shape[1])
print("- Reduced basis vectors (one per column)\n")
print(rb)
rs = case.get("Residus")[-1]
print("- Ordered residuals of reconstruction error\n ",rs)
print()
a0, a1 = 7, -2.5
print("- Elementary example of second field reconstruction as a linear")
print(" combination of the two base vectors, that can be guessed to be")
print(" multiplied with the respective coefficients %.1f and %.1f:"%(a0,a1))
print( a0*rb[:,0] + a1*rb[:,1])
print()
The execution result is the following:
Defining a set of artificial physical fields
--------------------------------------------
- Dimension of physical field space....................: 7
- Number of physical field vectors.....................: 7
- Collection of physical fields (one per column)
[[ 0 1 2 3 4 5 6]
[ 1 2 3 4 5 6 7]
[ 2 3 4 5 6 7 8]
[ 3 4 5 6 7 8 9]
[ 4 5 6 7 8 9 10]
[ 5 6 7 8 9 10 11]
[ 6 7 8 9 10 11 12]]
Search for optimal measurement positions
-------------------------------------------
- ADAO calculation performed
Display the optimal positioning of measures
-------------------------------------------
- Number of optimal measurement positions..............: 2
- Optimal measurement positions, numbered by default...: [6 0]
Reduced representation and error information
--------------------------------------------
- Number of vectors of the reduced basis...............: 2
- Reduced basis vectors (one per column)
[[ 0.5 1. ]
[ 0.58333333 0.83333333]
[ 0.66666667 0.66666667]
[ 0.75 0.5 ]
[ 0.83333333 0.33333333]
[ 0.91666667 0.16666667]
[ 1. -0. ]]
- Ordered residuals of reconstruction error
[2.43926218e+01 4.76969601e+00 2.51214793e-15]
- Elementary example of second field reconstruction as a linear
combination of the two base vectors, that can be guessed to be
multiplied with the respective coefficients 7.0 and -2.5:
[[1.]
[2.]
[3.]
[4.]
[5.]
[6.]
[7.]]
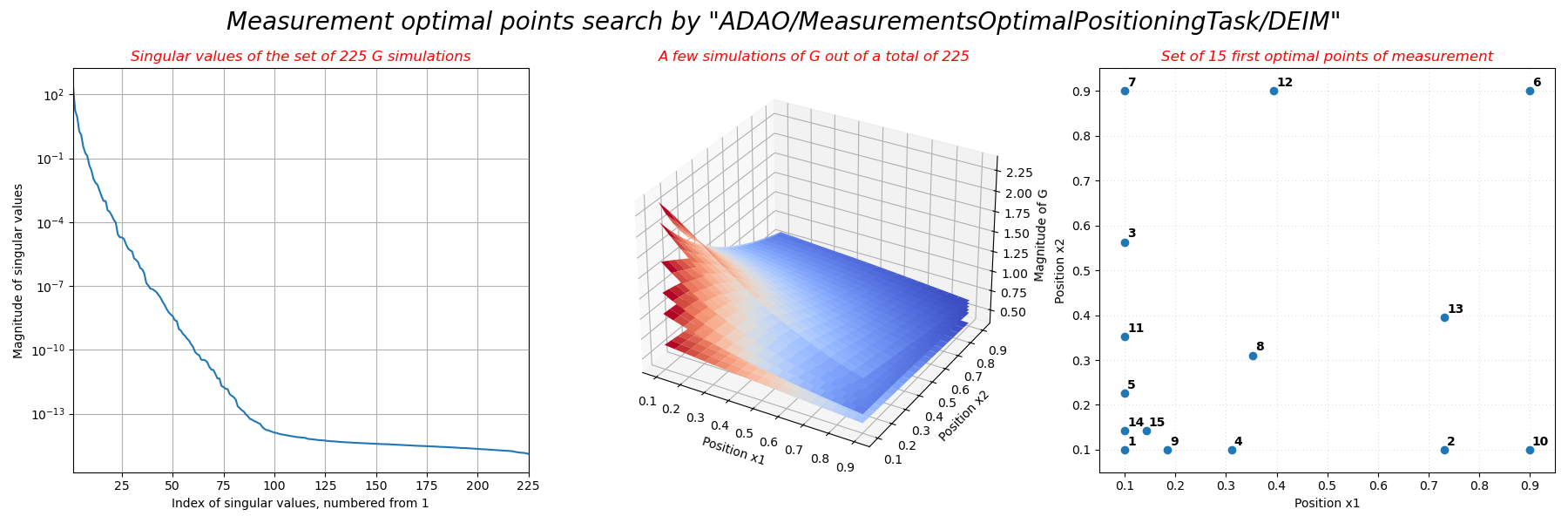
15.3.5.3. Measurement optimal positioning for DEIM decomposition¶
This more complete example describes the optimal positioning of measurements
associated with a reduced DEIM-type decomposition on a classical parametric
non-linear function, as proposed in reference [Chaturantabut10]. This
particular function has the notable advantage of being dependent only on a
position  in 2D and a parameter in 2D too. It therefore
enables a pedagogical illustration of optimal measurement points.
in 2D and a parameter in 2D too. It therefore
enables a pedagogical illustration of optimal measurement points.
This function  depends on the position
depends on the position
![x=(x_1,x_2)\in\Omega=[0.1,0.9]^2](_images/math/08663eb1009c16f44190c7763192abc28b6508f3.png) in the 2D plane, and on the parameter
in the 2D plane, and on the parameter
![\mu=(\mu_1,\mu_2)\in\mathcal{D}=[-1,-0.01]^2](_images/math/ad456d635018eae21f8c1f0fb5c9f60d55be15be.png) of dimension 2 :
of dimension 2 :

The function is represented on a regular  spatial grid of size
20x20 points. It is available in ADAO built-in test models under the name
spatial grid of size
20x20 points. It is available in ADAO built-in test models under the name
TwoDimensionalInverseDistanceCS2010, together with the spatial and
parametric domain default definition. So here we first build a set of
simulations of for various parameter values, then we look
for the best locations for measurements to obtain an DEIM interpolation
representation of the fields, by applying the DEIM-type decomposition algorithm
to it, and then derive some simple illustrations. We choose to look for an
arbitrary number nbmeasures of 15 measurement locations.
It can be seen that the singular values decrease steadily down to numerical
noise, indicating that around a hundred basis elements are needed to fully
represent the information contained in the set of parametric
simulations. Furthermore, the optimal measurement points in the
domain are inhomogeneously distributed, favoring the spatial
zone near the  corner in which the function varies
more.
corner in which the function varies
more.
# -*- coding: utf-8 -*-
#
import numpy as np
import matplotlib.pyplot as plt
np.random.seed(123456789)
#
dimension = 20
nbmeasures = 15
#
print("Defining a set of artificial physical fields")
from Models.TwoDimensionalInverseDistanceCS2010 \
import TwoDimensionalInverseDistanceCS2010 as Equation
Eq = Equation(dimension, dimension)
print()
#
print("Search for optimal measurement positions")
from adao import adaoBuilder
case = adaoBuilder.New()
case.setAlgorithmParameters(
Algorithm = "MeasurementsOptimalPositioningTask",
Parameters = {
"Variant":"DEIM",
"SampleAsnUplet":Eq.get_sample_of_mu(15, 15),
"MaximumNumberOfLocations":nbmeasures,
"ErrorNorm":"Linf",
"ErrorNormTolerance":0.,
"StoreSupplementaryCalculations":[
"SingularValues",
"OptimalPoints",
"EnsembleOfSimulations",
],
}
)
case.setBackground(Vector = [1,1] )
case.setObservationOperator(OneFunction = Eq.OneRealisation)
case.execute()
#
#-------------------------------------------------------------------------------
print()
print("Graphical display of the results")
#
sp = case.get("EnsembleOfSimulations")[-1]
sv = case.get("SingularValues")[-1]
op = case.get("OptimalPoints")[-1]
#
x1, x2 = Eq.get_x()
x1, x2 = np.meshgrid(x1, x2)
posx1 = [x1.reshape((-1,))[ip] for ip in op]
posx2 = [x2.reshape((-1,))[ip] for ip in op]
Omega = Eq.get_bounds_on_space()
#
fig = plt.figure(figsize=(18, 6))
name = "Measurement optimal points search by "
name += '"ADAO/MeasurementsOptimalPositioningTask/DEIM"'
fig.suptitle(name, fontsize=20, fontstyle="italic")
#
ax = fig.add_subplot(1, 3, 1)
name = "Singular values of the set of %i G simulations"%sp.shape[1]
print(" -", name)
ax.set_title(name, fontstyle="italic", color="red")
ax.set_xlabel("Index of singular values, numbered from 1")
ax.set_ylabel("Magnitude of singular values")
ax.set_xlim(1, len(sv))
ax.set_yscale("log")
ax.grid(True)
ax.plot(range(1, 1 + len(sv)), sv)
#
ax = fig.add_subplot(1, 3, 2, projection = "3d")
name = "A few simulations of G out of a total of %i"%sp.shape[1]
print(" -", name)
ax.set_title(name, fontstyle="italic", color="red")
ax.set_xlabel("Position x1")
ax.set_ylabel("Position x2")
ax.set_zlabel("Magnitude of G")
for i in range(sp.shape[1]):
if i % 44 != 0: continue
Gfield = sp[:,i].reshape((dimension, dimension))
ax.plot_surface(x1, x2, Gfield, cmap="coolwarm")
#
ax = fig.add_subplot(1, 3, 3)
name = "Set of %i first optimal points of measurement"%nbmeasures
print(" -", name)
ax.set_title(name, fontstyle="italic", color="red")
ax.set_xlabel("Position x1")
ax.set_ylabel("Position x2")
ax.set_xlim(Omega[0][0] - 0.05, Omega[0][1] + 0.05)
ax.set_ylim(Omega[1][0] - 0.05, Omega[1][1] + 0.05)
ax.grid(True, which="both", linestyle=(0, (1, 5)), linewidth=0.5)
ax.plot(posx1, posx2, markersize=6, marker="o", linestyle="")
for i in range(len(posx1)):
ax.text(posx1[i] + 0.005, posx2[i] + 0.01, str(i + 1), fontweight="bold")
#
plt.tight_layout()
fig.savefig("simple_MeasurementsOptimalPositioningTask3.png")
plt.close()
The execution result is the following:
Defining a set of artificial physical fields
Search for optimal measurement positions
Graphical display of the results
- Singular values of the set of 225 G simulations
- A few simulations of G out of a total of 225
- Set of 15 first optimal points of measurement
The figures illustrating the result of its execution are as follows: