#include <SalomeHPContainerTools.hxx>
Public Member Functions | |
| std::size_t | size () const |
| void | resize (std::size_t sz) |
| std::size_t | getNumberOfFreePlace () const |
| void | allocateFor (const std::vector< const Task * > &nodes) |
| void | allocateForCrude (const std::vector< std::pair< const Task *, std::size_t >> &nodes) |
| std::size_t | release (const Task *node) |
| std::size_t | locateTask (const Task *node) const |
| const SalomeContainerMonoHelper * | at (std::size_t pos) const |
| SalomeContainerMonoHelper * | at (std::size_t pos) |
| const SalomeContainerMonoHelper * | getHelperOfTaskThreadSafe (const SalomeHPContainer *cont, const Task *node) const |
| const SalomeContainerMonoHelper * | getHelperOfTask (const Task *node) const |
| SalomeContainerMonoHelper * | getHelperOfTaskThreadSafe (SalomeHPContainer *cont, const Task *node) |
| SalomeContainerMonoHelper * | getHelperOfTask (const Task *node) |
| std::vector< std::string > | getKernelContainerNames (const SalomeHPContainer *cont) const |
Private Member Functions | |
| void | checkNoCurrentWork () const |
| void | checkPosInVec (std::size_t pos) const |
Private Attributes | |
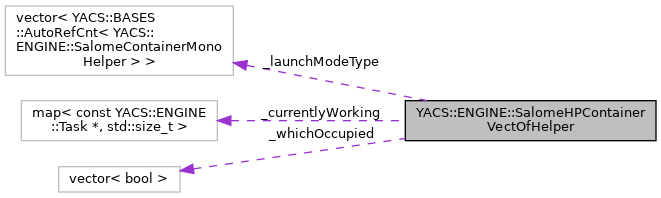
| std::vector< bool > | _whichOccupied |
| std::vector< BASES::AutoRefCnt< YACS::ENGINE::SalomeContainerMonoHelper > > | _launchModeType |
| std::map< const Task *, std::size_t > | _currentlyWorking |
Detailed Description
Definition at line 38 of file SalomeHPContainerTools.hxx.
Member Function Documentation
◆ allocateFor()
| void SalomeHPContainerVectOfHelper::allocateFor | ( | const std::vector< const Task * > & | nodes | ) |
Definition at line 47 of file SalomeHPContainerTools.cxx.
References _currentlyWorking, _whichOccupied, and gui.graph::distance().
◆ allocateForCrude()
| void SalomeHPContainerVectOfHelper::allocateForCrude | ( | const std::vector< std::pair< const Task *, std::size_t >> & | nodes | ) |
Definition at line 63 of file SalomeHPContainerTools.cxx.
References _currentlyWorking, _whichOccupied, and size().
Referenced by YACS::ENGINE::SalomeHPContainer::allocateFor().
◆ at() [1/2]
|
inline |
Definition at line 49 of file SalomeHPContainerTools.hxx.
References _launchModeType, and checkPosInVec().
◆ at() [2/2]
|
inline |
Definition at line 48 of file SalomeHPContainerTools.hxx.
References _launchModeType, and checkPosInVec().
Referenced by YACS::ENGINE::SalomeHPContainer::shutdown().
◆ checkNoCurrentWork()
|
private |
Definition at line 141 of file SalomeHPContainerTools.cxx.
References _currentlyWorking, and _launchModeType.
Referenced by resize().
◆ checkPosInVec()
|
private |
Definition at line 151 of file SalomeHPContainerTools.cxx.
References _launchModeType.
Referenced by at(), and locateTask().
◆ getHelperOfTask() [1/2]
| SalomeContainerMonoHelper * SalomeHPContainerVectOfHelper::getHelperOfTask | ( | const Task * | node | ) |
Definition at line 121 of file SalomeHPContainerTools.cxx.
References _launchModeType, and locateTask().
◆ getHelperOfTask() [2/2]
| const SalomeContainerMonoHelper * SalomeHPContainerVectOfHelper::getHelperOfTask | ( | const Task * | node | ) | const |
Definition at line 110 of file SalomeHPContainerTools.cxx.
References _launchModeType, and locateTask().
Referenced by YACS::ENGINE::SalomeHPContainer::getFullPlacementId(), and YACS::ENGINE::SalomeHPContainer::getPlacementId().
◆ getHelperOfTaskThreadSafe() [1/2]
| const SalomeContainerMonoHelper * SalomeHPContainerVectOfHelper::getHelperOfTaskThreadSafe | ( | const SalomeHPContainer * | cont, |
| const Task * | node | ||
| ) | const |
Definition at line 104 of file SalomeHPContainerTools.cxx.
References _launchModeType, and locateTask().
Referenced by YACS::ENGINE::SalomeHPContainer::isAlreadyStarted(), and YACS::ENGINE::SalomeHPContainer::start().
◆ getHelperOfTaskThreadSafe() [2/2]
| SalomeContainerMonoHelper * SalomeHPContainerVectOfHelper::getHelperOfTaskThreadSafe | ( | SalomeHPContainer * | cont, |
| const Task * | node | ||
| ) |
Definition at line 115 of file SalomeHPContainerTools.cxx.
References _launchModeType, and locateTask().
◆ getKernelContainerNames()
| std::vector< std::string > SalomeHPContainerVectOfHelper::getKernelContainerNames | ( | const SalomeHPContainer * | cont | ) | const |
Definition at line 126 of file SalomeHPContainerTools.cxx.
References _launchModeType, and yacsorb.CORBAEngineTest::i.
Referenced by YACS::ENGINE::SalomeHPContainer::getKernelContainerNames().
◆ getNumberOfFreePlace()
| std::size_t SalomeHPContainerVectOfHelper::getNumberOfFreePlace | ( | ) | const |
Definition at line 42 of file SalomeHPContainerTools.cxx.
References _whichOccupied.
◆ locateTask()
| std::size_t SalomeHPContainerVectOfHelper::locateTask | ( | const Task * | node | ) | const |
Definition at line 94 of file SalomeHPContainerTools.cxx.
References _currentlyWorking, and checkPosInVec().
Referenced by getHelperOfTask(), getHelperOfTaskThreadSafe(), and YACS::ENGINE::SalomeContainerToolsDecorator::getParameters().
◆ release()
| std::size_t SalomeHPContainerVectOfHelper::release | ( | const Task * | node | ) |
Definition at line 82 of file SalomeHPContainerTools.cxx.
References _currentlyWorking, and _whichOccupied.
Referenced by YACS::ENGINE::SalomeHPContainer::release().
◆ resize()
| void SalomeHPContainerVectOfHelper::resize | ( | std::size_t | sz | ) |
Definition at line 29 of file SalomeHPContainerTools.cxx.
References _currentlyWorking, _launchModeType, _whichOccupied, checkNoCurrentWork(), and yacsorb.CORBAEngineTest::i.
Referenced by YACS::ENGINE::SalomeHPContainer::setSizeOfPool().
◆ size()
|
inline |
Definition at line 41 of file SalomeHPContainerTools.hxx.
References _launchModeType.
Referenced by allocateForCrude(), YACS::ENGINE::SalomeContainerToolsDecorator::getParameters(), YACS::ENGINE::SalomeHPContainer::getSizeOfPool(), and YACS::ENGINE::SalomeHPContainer::shutdown().
Member Data Documentation
◆ _currentlyWorking
|
private |
Definition at line 61 of file SalomeHPContainerTools.hxx.
Referenced by allocateFor(), allocateForCrude(), checkNoCurrentWork(), locateTask(), release(), and resize().
◆ _launchModeType
|
private |
Definition at line 60 of file SalomeHPContainerTools.hxx.
Referenced by at(), checkNoCurrentWork(), checkPosInVec(), getHelperOfTask(), getHelperOfTaskThreadSafe(), getKernelContainerNames(), resize(), and size().
◆ _whichOccupied
|
private |
Definition at line 59 of file SalomeHPContainerTools.hxx.
Referenced by allocateFor(), allocateForCrude(), getNumberOfFreePlace(), release(), and resize().
The documentation for this class was generated from the following files:
- src/runtime/SalomeHPContainerTools.hxx
- src/runtime/SalomeHPContainerTools.cxx