#include <GuiExecutor.hxx>
Public Member Functions | |
| GuiExecutor (YACS::ENGINE::Proc *proc) | |
| virtual | ~GuiExecutor () |
| void | closeContext () |
| void | startResumeDataflow (bool initialize=false) |
| bool | checkEndOfDataflow (bool display=true) |
| void | killDataflow () |
| void | suspendDataflow () |
| void | resumeDataflow () |
| void | stopDataflow () |
| void | resetDataflow () |
| void | setStepByStepMode () |
| void | setContinueMode () |
| void | setBreakpointMode () |
| void | setStopOnError (bool aMode) |
| void | unsetStopOnError () |
| void | saveState (const std::string &xmlFile) |
| void | setLoadStateFile (std::string xmlFile) |
| YACS_ORB::executionMode | getCurrentExecMode () |
| int | getExecutorState () |
| void | setBreakpointList (std::list< std::string > breakpointList) |
| void | addBreakpoint (std::string breakpoint) |
| void | removeBreakpoint (std::string breakpoint) |
| void | setNextStepList (std::list< std::string > nextStepList) |
| void | setInPortValue (YACS::ENGINE::DataPort *port, std::string value) |
| void | registerStatusObservers () |
| bool | isRunning () const |
| bool | isStopOnError () const |
| void | setEngineRef (YACS_ORB::YACS_Gen_ptr ref) |
| YACS::ENGINE::Proc * | getProc () |
| std::string | getErrorDetails (YACS::ENGINE::Node *node) |
| std::string | getErrorReport (YACS::ENGINE::Node *node) |
| std::string | getContainerLog () |
| std::string | getContainerLog (YACS::ENGINE::Node *node) |
| void | shutdownProc () |
| void | setShutdownLevel (int level) |
| int | getShutdownLevel () |
| YACS::ExecutorState | updateSchema (std::string jobState) |
| virtual bool | event (QEvent *e) |
Protected Member Functions | |
| void | setBPList () |
Protected Attributes | |
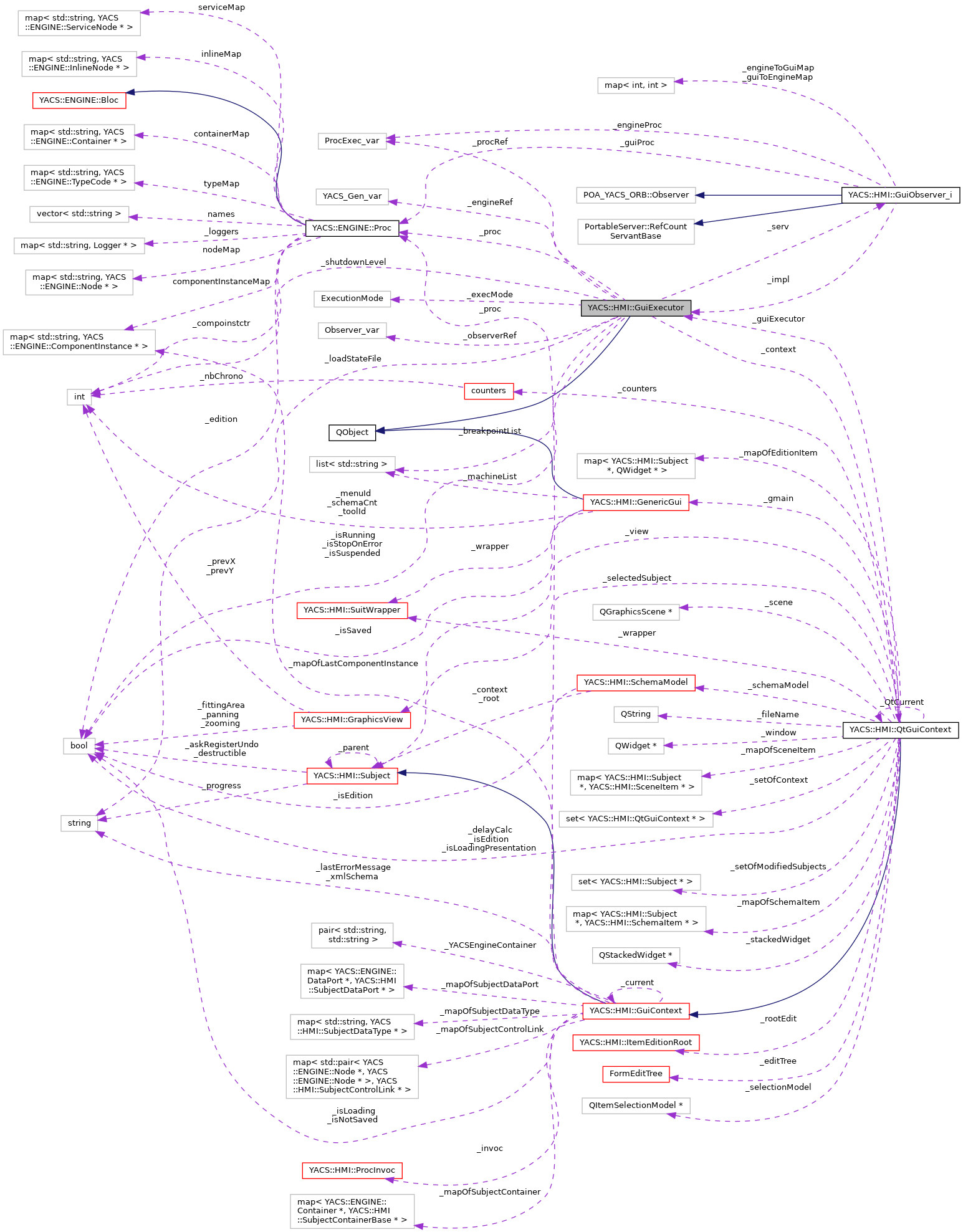
| YACS::ENGINE::Proc * | _proc |
| QtGuiContext * | _context |
| YACS_ORB::YACS_Gen_var | _engineRef |
| YACS_ORB::ProcExec_var | _procRef |
| YACS_ORB::Observer_var | _observerRef |
| YACS::ExecutionMode | _execMode |
| GuiObserver_i * | _serv |
| bool | _isRunning |
| bool | _isSuspended |
| bool | _isStopOnError |
| int | _shutdownLevel |
| std::list< std::string > | _breakpointList |
| std::string | _loadStateFile |
Detailed Description
Definition at line 46 of file GuiExecutor.hxx.
Constructor & Destructor Documentation
◆ GuiExecutor()
| GuiExecutor::GuiExecutor | ( | YACS::ENGINE::Proc * | proc | ) |
Definition at line 46 of file GuiExecutor.cxx.
References driver_internal::_proc, YACS::CONTINUE, and DEBTRACE.
◆ ~GuiExecutor()
|
virtual |
Definition at line 74 of file GuiExecutor.cxx.
References DEBTRACE.
Member Function Documentation
◆ addBreakpoint()
| void GuiExecutor::addBreakpoint | ( | std::string | breakpoint | ) |
Definition at line 348 of file GuiExecutor.cxx.
References YACS::CONTINUE, and DEBTRACE.
Referenced by YACS::HMI::SchemaNodeItem::toggleState().
◆ checkEndOfDataflow()
| bool GuiExecutor::checkEndOfDataflow | ( | bool | display = true | ) |
◆ closeContext()
| void GuiExecutor::closeContext | ( | ) |
Definition at line 79 of file GuiExecutor.cxx.
References DEBTRACE.
◆ event()
|
virtual |
Definition at line 498 of file GuiExecutor.cxx.
References DEBTRACE, YACS::ENGINE::Node::getLocalInputPorts(), YACS::ENGINE::Node::getLocalOutputPorts(), YACS::HMI::SubjectNode::getName(), YACS::HMI::SubjectNode::getNode(), YACS::HMI::YACSEvent::getYACSEvent(), yacsorb.CORBAEngineTest::i, YACS::PAUSED, YACS::HMI::PROGRESS, YACS::HMI::SubjectDataPort::setExecValue(), YACS::HMI::Subject::setProgress(), yacsorb.CORBAEngineTest::state, YACS::HMI::Subject::update(), YACS::HMI::SubjectNode::update(), YACS::HMI::UPDATEPROGRESS, YACS::WAITINGTASKS, and YASSERT.
◆ getContainerLog() [1/2]
| std::string GuiExecutor::getContainerLog | ( | ) |
◆ getContainerLog() [2/2]
| std::string GuiExecutor::getContainerLog | ( | YACS::ENGINE::Node * | node | ) |
Definition at line 459 of file GuiExecutor.cxx.
References DEBTRACE, and YACS::ENGINE::Node::getNumId().
◆ getCurrentExecMode()
| YACS_ORB::executionMode GuiExecutor::getCurrentExecMode | ( | ) |
Definition at line 306 of file GuiExecutor.cxx.
References YACS_ORB::CONTINUE, YACS::CONTINUE, DEBTRACE, YACS_ORB::STEPBYSTEP, YACS::STEPBYSTEP, YACS_ORB::STOPBEFORENODES, and YACS::STOPBEFORENODES.
◆ getErrorDetails()
| std::string GuiExecutor::getErrorDetails | ( | YACS::ENGINE::Node * | node | ) |
Definition at line 421 of file GuiExecutor.cxx.
References DEBTRACE, and YACS::ENGINE::Node::getNumId().
◆ getErrorReport()
| std::string GuiExecutor::getErrorReport | ( | YACS::ENGINE::Node * | node | ) |
Definition at line 432 of file GuiExecutor.cxx.
References DEBTRACE, and YACS::ENGINE::Node::getNumId().
Referenced by YACS::HMI::EditionProc::update().
◆ getExecutorState()
| int GuiExecutor::getExecutorState | ( | ) |
Definition at line 318 of file GuiExecutor.cxx.
References DEBTRACE, YACS::FINISHED, and YACS::NOTYETINITIALIZED.
◆ getProc()
|
inline |
◆ getShutdownLevel()
|
inline |
Definition at line 93 of file GuiExecutor.hxx.
References _shutdownLevel.
Referenced by YACS::HMI::EditionProc::EditionProc().
◆ isRunning()
|
inline |
◆ isStopOnError()
|
inline |
◆ killDataflow()
| void GuiExecutor::killDataflow | ( | ) |
◆ registerStatusObservers()
| void GuiExecutor::registerStatusObservers | ( | ) |
Definition at line 386 of file GuiExecutor.cxx.
References driver_internal::_proc, and DEBTRACE.
◆ removeBreakpoint()
| void GuiExecutor::removeBreakpoint | ( | std::string | breakpoint | ) |
Definition at line 365 of file GuiExecutor.cxx.
References DEBTRACE.
Referenced by YACS::HMI::SchemaNodeItem::toggleState().
◆ resetDataflow()
| void GuiExecutor::resetDataflow | ( | ) |
Definition at line 217 of file GuiExecutor.cxx.
References DEBTRACE, and YACS_ORB::STEPBYSTEP.
◆ resumeDataflow()
| void GuiExecutor::resumeDataflow | ( | ) |
Definition at line 200 of file GuiExecutor.cxx.
References DEBTRACE.
◆ saveState()
| void GuiExecutor::saveState | ( | const std::string & | xmlFile | ) |
Definition at line 285 of file GuiExecutor.cxx.
References DEBTRACE, YACS::FINISHED, and YACS::NOTYETINITIALIZED.
◆ setBPList()
|
protected |
Definition at line 574 of file GuiExecutor.cxx.
References DEBTRACE, and yacsorb.CORBAEngineTest::i.
◆ setBreakpointList()
| void GuiExecutor::setBreakpointList | ( | std::list< std::string > | breakpointList | ) |
◆ setBreakpointMode()
| void GuiExecutor::setBreakpointMode | ( | ) |
Definition at line 252 of file GuiExecutor.cxx.
References DEBTRACE, YACS_ORB::STOPBEFORENODES, and YACS::STOPBEFORENODES.
◆ setContinueMode()
| void GuiExecutor::setContinueMode | ( | ) |
Definition at line 244 of file GuiExecutor.cxx.
References YACS_ORB::CONTINUE, YACS::CONTINUE, and DEBTRACE.
◆ setEngineRef()
| void GuiExecutor::setEngineRef | ( | YACS_ORB::YACS_Gen_ptr | ref | ) |
◆ setInPortValue()
| void GuiExecutor::setInPortValue | ( | YACS::ENGINE::DataPort * | port, |
| std::string | value | ||
| ) |
Definition at line 482 of file GuiExecutor.cxx.
References DEBTRACE, YACS::ENGINE::ComposedNode::getChildName(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::Node::getName(), YACS::ENGINE::Port::getNode(), and YACS::ENGINE::Node::getRootNode().
Referenced by YACS::HMI::EditionElementaryNode::onCommitData(), and YACS::HMI::TreeView::onCommitData().
◆ setLoadStateFile()
| void GuiExecutor::setLoadStateFile | ( | std::string | xmlFile | ) |
Definition at line 299 of file GuiExecutor.cxx.
References DEBTRACE.
Referenced by YACS::HMI::GenericGui::onRunLoadedSchema().
◆ setNextStepList()
| void GuiExecutor::setNextStepList | ( | std::list< std::string > | nextStepList | ) |
Definition at line 372 of file GuiExecutor.cxx.
References DEBTRACE, and yacsorb.CORBAEngineTest::i.
◆ setShutdownLevel()
|
inline |
Definition at line 92 of file GuiExecutor.hxx.
References _shutdownLevel.
Referenced by YACS::HMI::EditionProc::onLevelChange().
◆ setStepByStepMode()
| void GuiExecutor::setStepByStepMode | ( | ) |
Definition at line 236 of file GuiExecutor.cxx.
References DEBTRACE, YACS_ORB::STEPBYSTEP, and YACS::STEPBYSTEP.
◆ setStopOnError()
| void GuiExecutor::setStopOnError | ( | bool | aMode | ) |
Definition at line 260 of file GuiExecutor.cxx.
References DEBTRACE.
Referenced by YACS::HMI::GenericGui::onRunLoadedSchema().
◆ shutdownProc()
| void GuiExecutor::shutdownProc | ( | ) |
◆ startResumeDataflow()
| void GuiExecutor::startResumeDataflow | ( | bool | initialize = false | ) |
Definition at line 85 of file GuiExecutor.cxx.
References yacsorb.CORBAEngineTest::comp, DEBTRACE, YACS::ENGINE::RuntimeSALOME::getOrb(), YACS::ENGINE::getSALOMERuntime(), orb, YACS_ORB::STEPBYSTEP, and YASSERT.
Referenced by YACS::HMI::GenericGui::onRunLoadedSchema().
◆ stopDataflow()
| void GuiExecutor::stopDataflow | ( | ) |
◆ suspendDataflow()
| void GuiExecutor::suspendDataflow | ( | ) |
◆ unsetStopOnError()
| void GuiExecutor::unsetStopOnError | ( | ) |
◆ updateSchema()
| YACS::ExecutorState GuiExecutor::updateSchema | ( | std::string | jobState | ) |
Definition at line 588 of file GuiExecutor.cxx.
References driver_internal::_proc, YACS::ACTIVATED, YACS::DONE, YACS::FAILED, YACS::FINISHED, YACS::ENGINE::Node::getLocalInputPorts(), YACS::ENGINE::Node::getLocalOutputPorts(), YACS::HMI::SubjectNode::getNode(), YACS::LOADED, YACS::NOTYETINITIALIZED, YACS::PAUSED, YACS::RUNNING, YACS::HMI::SubjectDataPort::setExecValue(), yacsorb.CORBAEngineTest::state, YACS::SUSPENDED, YACS::HMI::Subject::update(), YACS::HMI::SubjectNode::update(), YACS::HMI::UPDATEPROGRESS, and YASSERT.
Referenced by YACS::HMI::BatchJobsListDialog::get_dump_file().
Member Data Documentation
◆ _breakpointList
|
protected |
Definition at line 117 of file GuiExecutor.hxx.
◆ _context
|
protected |
Definition at line 103 of file GuiExecutor.hxx.
◆ _engineRef
|
protected |
Definition at line 105 of file GuiExecutor.hxx.
◆ _execMode
|
protected |
Definition at line 109 of file GuiExecutor.hxx.
◆ _isRunning
|
protected |
Definition at line 112 of file GuiExecutor.hxx.
Referenced by isRunning().
◆ _isStopOnError
|
protected |
Definition at line 114 of file GuiExecutor.hxx.
Referenced by isStopOnError().
◆ _isSuspended
|
protected |
Definition at line 113 of file GuiExecutor.hxx.
◆ _loadStateFile
|
protected |
Definition at line 118 of file GuiExecutor.hxx.
◆ _observerRef
|
protected |
Definition at line 107 of file GuiExecutor.hxx.
◆ _proc
|
protected |
Definition at line 102 of file GuiExecutor.hxx.
Referenced by getProc().
◆ _procRef
|
protected |
Definition at line 106 of file GuiExecutor.hxx.
◆ _serv
|
protected |
Definition at line 110 of file GuiExecutor.hxx.
◆ _shutdownLevel
|
protected |
Definition at line 115 of file GuiExecutor.hxx.
Referenced by getShutdownLevel(), and setShutdownLevel().
The documentation for this class was generated from the following files:
- src/genericgui/GuiExecutor.hxx
- src/genericgui/GuiExecutor.cxx