#include <RuntimeSALOME.hxx>
Public Types | |
| enum | { IsPyExt = 1 , UsePython = 2 , UseCorba = 4 , UseXml = 8 , UseCpp = 16 , UseSalome = 32 } |
Public Member Functions | |
| std::unique_ptr< SALOME_NamingService_Container_Abstract > | getNS () |
| virtual std::string | getVersion () const |
| virtual void | init (long flags, int argc, char *argv[]) |
| CORBA and Python initialization. More... | |
| virtual void | fini (bool isFinalizingPython=true) |
| PyObject * | launchSubProcess (const std::vector< std::string > &cmds) |
| virtual std::vector< std::pair< std::string, int > > | getCatalogOfComputeNodes () const |
| virtual InputPort * | createInputPort (const std::string &name, const std::string &impl, Node *node, TypeCode *type) |
| virtual OutputPort * | createOutputPort (const std::string &name, const std::string &impl, Node *node, TypeCode *type) |
| virtual InputDataStreamPort * | createInputDataStreamPort (const std::string &name, Node *node, TypeCode *type) |
| virtual OutputDataStreamPort * | createOutputDataStreamPort (const std::string &name, Node *node, TypeCode *type) |
| virtual DataNode * | createInDataNode (const std::string &kind, const std::string &name) |
| virtual DataNode * | createOutDataNode (const std::string &kind, const std::string &name) |
| virtual InlineFuncNode * | createFuncNode (const std::string &kind, const std::string &name) |
| virtual InlineNode * | createScriptNode (const std::string &kind, const std::string &name) |
| virtual ServiceNode * | createRefNode (const std::string &kind, const std::string &name) |
| virtual ServiceNode * | createCompoNode (const std::string &kind, const std::string &name) |
| virtual ServiceInlineNode * | createSInlineNode (const std::string &kind, const std::string &name) |
| virtual ComponentInstance * | createComponentInstance (const std::string &name, const std::string &kind="") |
| virtual Container * | createContainer (const std::string &kind="") |
| virtual WhileLoop * | createWhileLoop (const std::string &name) |
| virtual ForLoop * | createForLoop (const std::string &name) |
| virtual OptimizerLoop * | createOptimizerLoop (const std::string &name, const std::string &algLib, const std::string &factoryName, bool algInitOnFile, const std::string &kind="", Proc *procForTypes=NULL) |
| virtual Bloc * | createBloc (const std::string &name) |
| virtual Proc * | createProc (const std::string &name) |
| virtual TypeCode * | createInterfaceTc (const std::string &id, const std::string &name, std::list< TypeCodeObjref * > ltc) |
| virtual TypeCode * | createSequenceTc (const std::string &id, const std::string &name, TypeCode *content) |
| virtual TypeCodeStruct * | createStructTc (const std::string &id, const std::string &name) |
| virtual InputPort * | adapt (InputPort *source, const std::string &impl, TypeCode *type, bool init=false) |
| Main adapter function : adapt an InputPort to be able to connect it to an OutputPort with a possible different implementation. More... | |
| virtual InputPort * | adapt (InPropertyPort *source, const std::string &impl, TypeCode *type, bool init=false) |
| Adapter function for InPropertyPort. More... | |
| virtual InputPort * | adaptNeutral (InputPort *source, const std::string &impl, TypeCode *type, bool init) |
| Adapt a Neutral input port to connect it to an output port with a given implementation. More... | |
| virtual InputPort * | adapt (InputCorbaPort *source, const std::string &impl, TypeCode *type, bool init) |
| Adapt a CORBA input port to an output which implementation and type are given by impl and type. More... | |
| virtual InputPort * | adaptCorbaToCorba (InputCorbaPort *source, TypeCode *type) |
| Adapt a CORBA input port to a CORBA output port. More... | |
| virtual InputPort * | adaptCorbaToNeutral (InputCorbaPort *source, TypeCode *type) |
| Adapt a CORBA input port to a neutral data. More... | |
| virtual InputPort * | adaptCorbaToPython (InputCorbaPort *source, TypeCode *type) |
| Adapt a CORBA input port to a Python output port. More... | |
| virtual InputPort * | adaptCorbaToCpp (InputCorbaPort *source, TypeCode *type) |
| Adapt a CORBA input port to a C++ output port. More... | |
| virtual InputPort * | adaptCorbaToXml (InputCorbaPort *source, TypeCode *type) |
| Adapt a CORBA input port to connect it to a XML output port. More... | |
| virtual InputPort * | adapt (InputPyPort *source, const std::string &impl, TypeCode *type, bool init) |
| Adapt a Python input port to an output port with a given implementation. More... | |
| virtual InputPort * | adaptPythonToCorba (InputPyPort *source, TypeCode *type) |
| Adapt a Python input port to a Corba output port. More... | |
| virtual InputPort * | adaptPythonToNeutral (InputPyPort *source, TypeCode *type) |
| Adapt a Python input port to a Neutral data port. More... | |
| virtual InputPort * | adaptPythonToPython (InputPyPort *source, TypeCode *type, bool init) |
| Adapt a Python input port to a Python output port. More... | |
| virtual InputPort * | adaptPythonToXml (InputPyPort *source, TypeCode *type) |
| Adapt a Python input port to a Xml output port. More... | |
| virtual InputPort * | adaptPythonToCpp (InputPyPort *source, TypeCode *type) |
| Adapt a Python input port to a C++ output port. More... | |
| virtual InputPort * | adapt (InputCppPort *source, const std::string &impl, TypeCode *type, bool init) |
| Adapt a C++ input port to connect it to an output port with a given implementation. More... | |
| virtual InputPort * | adaptCppToCorba (InputCppPort *source, TypeCode *type) |
| Adapt a C++ input port to connect it to a CORBA output port. More... | |
| virtual InputPort * | adaptCppToNeutral (InputCppPort *source, TypeCode *type) |
| Adapt a C++ input port to a Neutral output port. More... | |
| virtual InputPort * | adaptCppToPython (InputCppPort *source, TypeCode *type) |
| Adapt a C++ input port to a Python output port. More... | |
| virtual InputPort * | adaptCppToXml (InputCppPort *source, TypeCode *type) |
| virtual InputPort * | adaptCppToCpp (InputCppPort *source, TypeCode *type) |
| Adapt a C++ input port to a C++ output port. More... | |
| virtual InputPort * | adapt (InputXmlPort *source, const std::string &impl, TypeCode *type, bool init) |
| Adapt an Xml input port to an output port which implementation is given by impl. More... | |
| virtual InputPort * | adaptXmlToCorba (InputXmlPort *source, TypeCode *type) |
| Adapt a XML input port to connect it to a CORBA output port. More... | |
| virtual InputPort * | adaptXmlToPython (InputXmlPort *inport, TypeCode *type) |
| Adapt a XML input port to a Python output port. More... | |
| virtual InputPort * | adaptXmlToCpp (InputXmlPort *inport, TypeCode *type) |
| Adapt a XML input port to a C++ output port. More... | |
| virtual InputPort * | adaptXmlToNeutral (InputXmlPort *inport, TypeCode *type) |
| Adapt a XML input port to a Neutral output port. More... | |
| virtual InputPort * | adaptXmlToXml (InputXmlPort *inport, TypeCode *type, bool init) |
| Adapt a XML input port to a Xml output port. More... | |
| virtual InputPort * | adaptNeutralToXml (InputPort *inport, TypeCode *type) |
| Adapt a Neutral input port to a Xml output port. More... | |
| virtual InputPort * | adaptNeutralToPython (InputPort *inport, TypeCode *type) |
| Adapt a Neutral input port to a Python output port. More... | |
| virtual InputPort * | adaptNeutralToCorba (InputPort *inport, TypeCode *type) |
| Adapt a Neutral input port to a Corba output port. More... | |
| virtual InputPort * | adaptNeutralToCpp (InputPort *inport, TypeCode *type) |
| Adapt a Neutral input port to a C++ output port. More... | |
| virtual void * | convertNeutral (TypeCode *type, Any *data) |
| Convert a YACS::ENGINE::Any object to an external object with type type. More... | |
| virtual std::string | convertNeutralAsString (TypeCode *type, Any *data) |
| Convert a YACS::ENGINE::Any object to a string to be used in GUI for example. More... | |
| virtual std::string | convertPyObjectToString (PyObject *ob) |
| virtual PyObject * | convertStringToPyObject (const std::string &s) |
| virtual | ~RuntimeSALOME () |
| void | loadModulCatalog () |
| CORBA::ORB_ptr | getOrb () const |
| CORBA::Object_var | getFromNS (const char *entry) const |
| PyObject * | getPyOrb () const |
| PyObject * | getBuiltins () const |
| DynamicAny::DynAnyFactory_ptr | getDynFactory () const |
| omniORBpyAPI * | getApi () |
| PyObject * | get_omnipy () |
| ConnectionManager & | getConnectionManager () |
 Public Member Functions inherited from YACS::ENGINE::Runtime Public Member Functions inherited from YACS::ENGINE::Runtime | |
| virtual void | init () |
| virtual void | fini () |
| virtual Catalog * | loadCatalog (const std::string &sourceKind, const std::string &path) |
| Load a catalog of calculation to use as factory. More... | |
| virtual ForEachLoop * | createForEachLoop (const std::string &name, TypeCode *type) |
| virtual ForEachLoopDyn * | createForEachLoopDyn (const std::string &name, TypeCode *type) |
| virtual Switch * | createSwitch (const std::string &name) |
| virtual void | removeRuntime () |
| virtual | ~Runtime () |
| virtual void | setCatalogLoaderFactory (const std::string &name, CatalogLoader *factory) |
| Add a catalog loader factory to the map _catalogLoaderFactoryMap under the name name. More... | |
| Catalog * | getBuiltinCatalog () |
| Get the catalog of base nodes (elementary and composed) More... | |
| virtual void | addCatalog (Catalog *catalog) |
| Add a catalog of types and nodes to the runtime. More... | |
| virtual TypeCode * | getTypeCode (const std::string &name) |
| Get a typecode by its name from runtime catalogs. More... | |
Static Public Member Functions | |
| static void | setRuntime (long flags=UsePython+UseCorba+UseXml+UseCpp+UseSalome, int argc=0, char *argv[]=NULL) |
Public Attributes | |
| enum YACS::ENGINE::RuntimeSALOME:: { ... } | FLAGS |
| Public Attributes inherited from YACS::ENGINE::Runtime | |
| std::map< std::string, CatalogLoader * > | _catalogLoaderFactoryMap |
Protected Member Functions | |
| RuntimeSALOME () | |
| RuntimeSALOME (long flags, int argc, char *argv[]) | |
| void | initBuiltins () |
| Protected Member Functions inherited from YACS::ENGINE::Runtime | |
| Runtime () | |
Protected Attributes | |
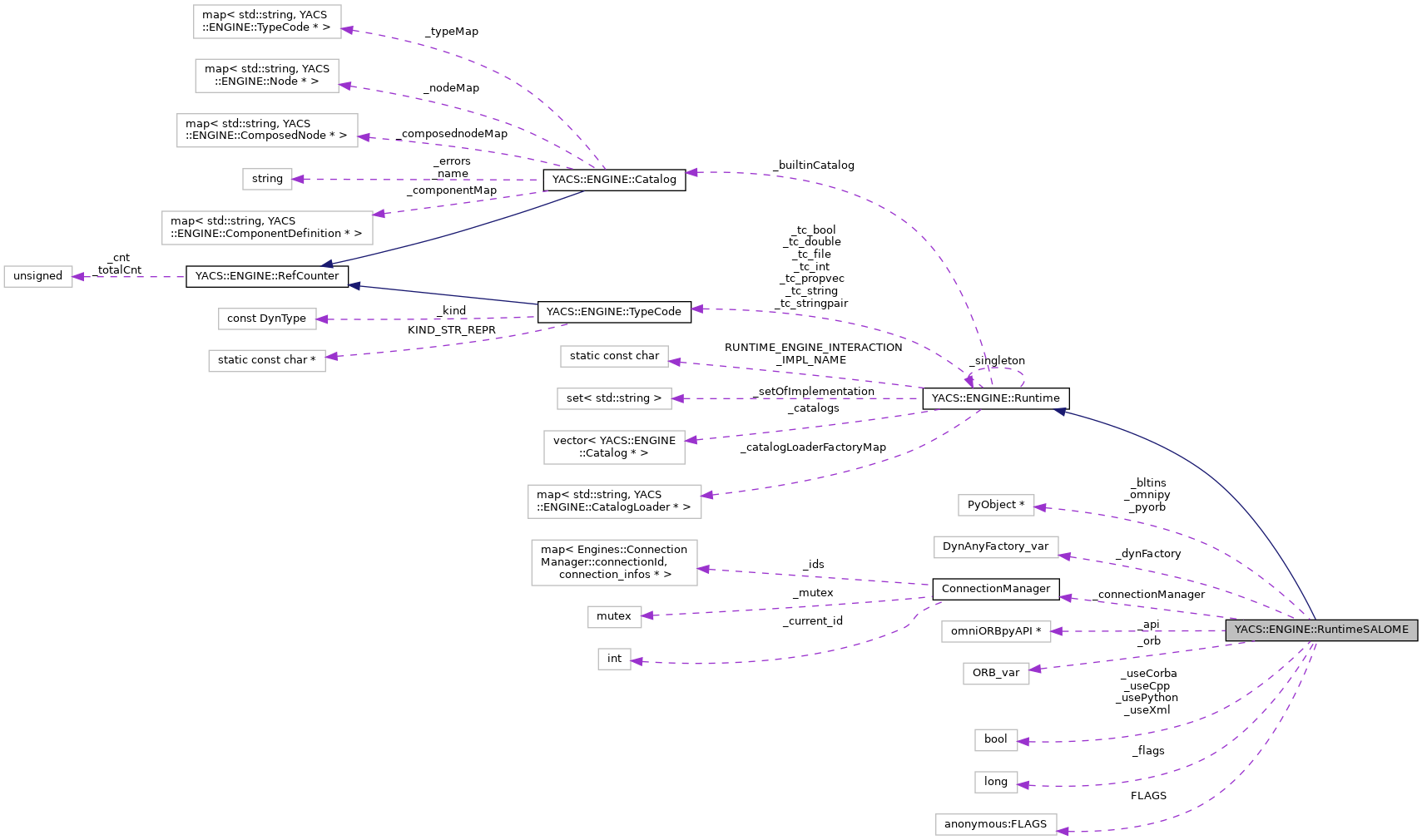
| CORBA::ORB_var | _orb |
| PyObject * | _pyorb |
| PyObject * | _bltins |
| DynamicAny::DynAnyFactory_var | _dynFactory |
| omniORBpyAPI * | _api |
| PyObject * | _omnipy |
| long | _flags |
| bool | _usePython |
| bool | _useCorba |
| bool | _useCpp |
| bool | _useXml |
| Protected Attributes inherited from YACS::ENGINE::Runtime | |
| std::set< std::string > | _setOfImplementation |
| Catalog * | _builtinCatalog |
| std::vector< Catalog * > | _catalogs |
Static Private Member Functions | |
| static Runtime * | getSingleton () |
Private Attributes | |
| ConnectionManager | _connectionManager |
Friends | |
| RuntimeSALOME * | getSALOMERuntime () |
Additional Inherited Members | |
| Static Public Attributes inherited from YACS::ENGINE::Runtime | |
| static const char | RUNTIME_ENGINE_INTERACTION_IMPL_NAME [] ="Neutral" |
| static YACS::ENGINE::TypeCode * | _tc_double = 0 |
| static YACS::ENGINE::TypeCode * | _tc_int = 0 |
| static YACS::ENGINE::TypeCode * | _tc_bool = 0 |
| static YACS::ENGINE::TypeCode * | _tc_string = 0 |
| static YACS::ENGINE::TypeCode * | _tc_file = 0 |
| static YACS::ENGINE::TypeCode * | _tc_stringpair = 0 |
| static YACS::ENGINE::TypeCode * | _tc_propvec = 0 |
| Static Protected Attributes inherited from YACS::ENGINE::Runtime | |
| static Runtime * | _singleton = 0 |
Detailed Description
Definition at line 58 of file RuntimeSALOME.hxx.
Member Enumeration Documentation
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| IsPyExt | |
| UsePython | |
| UseCorba | |
| UseXml | |
| UseCpp | |
| UseSalome | |
Definition at line 64 of file RuntimeSALOME.hxx.
Constructor & Destructor Documentation
◆ ~RuntimeSALOME()
|
virtual |
Definition at line 244 of file RuntimeSALOME.cxx.
References DEBTRACE.
◆ RuntimeSALOME() [1/2]
|
protected |
Singleton creation, initialize converter map
Definition at line 165 of file RuntimeSALOME.cxx.
References YASSERT.
◆ RuntimeSALOME() [2/2]
|
protected |
Definition at line 214 of file RuntimeSALOME.cxx.
Member Function Documentation
◆ adapt() [1/6]
|
virtual |
Adapter function for InPropertyPort.
- Parameters
-
source : InPropertyPort to be adapted impl : new implementation (C++, python, CORBA, XML, Neutral) type : data type provided by the InPropertyPort init : indicates if the adapted InPropertyPort will be used for initialization (value true) or not (value false)
- Returns
- : adapted InputPort
Implements YACS::ENGINE::Runtime.
Definition at line 892 of file RuntimeSALOME.cxx.
◆ adapt() [2/6]
|
virtual |
Adapt a CORBA input port to an output which implementation and type are given by impl and type.
- Parameters
-
source : input port to adapt to implementation impl and type type impl : output port implementation (C++, Python or Corba) type : outport data type init : if init is true the proxy port will be used in initialization of input port (needs value check)
- Returns
- an adaptator port which type depends on impl
Definition at line 1437 of file RuntimeSALOME.cxx.
◆ adapt() [3/6]
|
virtual |
Adapt a C++ input port to connect it to an output port with a given implementation.
- Parameters
-
source : input port to adapt to implementation impl and type type impl : output port implementation (C++, Python or Corba) type : output port supported type init : if init is true the proxy port will be used in initialization of input port (needs value check)
- Returns
- the adaptated port
Definition at line 1868 of file RuntimeSALOME.cxx.
References DEBTRACE.
◆ adapt() [4/6]
|
virtual |
Main adapter function : adapt an InputPort to be able to connect it to an OutputPort with a possible different implementation.
- Parameters
-
source : InputPort to be adapted impl : new implementation (C++, python, CORBA, XML, Neutral) type : data type provided by the InputPort init : indicates if the adapted InputPort will be used for initialization (value true) or not (value false)
- Returns
- : adapted InputPort
Implements YACS::ENGINE::Runtime.
Definition at line 849 of file RuntimeSALOME.cxx.
References gui.adapt::adapt(), YACS::ENGINE::Node::getImplementation(), and YACS::ENGINE::Port::getNode().
◆ adapt() [5/6]
|
virtual |
Adapt a Python input port to an output port with a given implementation.
- Parameters
-
source : input port to adapt to implementation impl and type type impl : output port implementation (C++, Python or Corba) type : output port type init : if init is true the proxy port will be used in initialization of input port (needs value check)
- Returns
- adaptated input port
Definition at line 1703 of file RuntimeSALOME.cxx.
◆ adapt() [6/6]
|
virtual |
Adapt an Xml input port to an output port which implementation is given by impl.
- Parameters
-
source : input port to adapt to implementation impl and type type impl : output port implementation (C++, Python or Corba) type : output port supported type init : if init is true the proxy port will be used in initialization of input port (needs value check)
- Returns
- the adaptated port
Definition at line 1175 of file RuntimeSALOME.cxx.
◆ adaptCorbaToCorba()
|
virtual |
Adapt a CORBA input port to a CORBA output port.
- Parameters
-
inport : input port to adapt to CORBA outport data type type : outport data type
- Returns
- an adaptator port of type InputCORBAPort
Definition at line 1215 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::TypeCode::isA(), and YACS::ENGINE::isAdaptableCorbaCorba().
◆ adaptCorbaToCpp()
|
virtual |
Adapt a CORBA input port to a C++ output port.
- Parameters
-
inport : input port to adapt to C++ type type type : outport data type
- Returns
- an adaptator port of type InputCPPPort
Definition at line 1352 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::isAdaptableCorbaCpp().
◆ adaptCorbaToNeutral()
|
virtual |
Adapt a CORBA input port to a neutral data.
- Parameters
-
inport : InputPort to adapt to Neutral type type type : outport data type
- Returns
- an adaptator port of type Neutralxxxx
Definition at line 1378 of file RuntimeSALOME.cxx.
References YACS::ENGINE::Bool, YACS::ENGINE::Double, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::Int, YACS::ENGINE::isAdaptableCorbaNeutral(), YACS::ENGINE::TypeCode::kind(), YACS::ENGINE::Objref, YACS::ENGINE::Sequence, YACS::ENGINE::String, and YACS::ENGINE::Struct.
◆ adaptCorbaToPython()
|
virtual |
Adapt a CORBA input port to a Python output port.
- Parameters
-
inport : input port to adapt to Python type type type : outport data type
- Returns
- an adaptator port of type InputPyPort
Definition at line 1247 of file RuntimeSALOME.cxx.
References YACS::ENGINE::Bool, YACS::ENGINE::Double, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::Int, YACS::ENGINE::isAdaptableCorbaPyObject(), YACS::ENGINE::TypeCode::kind(), YACS::ENGINE::Objref, YACS::ENGINE::Sequence, YACS::ENGINE::String, and YACS::ENGINE::Struct.
◆ adaptCorbaToXml()
|
virtual |
Adapt a CORBA input port to connect it to a XML output port.
- Parameters
-
inport : input port to adapt to Xml type type type : type supported by output port
- Returns
- an adaptator port of type InputXmlPort
Definition at line 1326 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::TypeCode::isAdaptable().
◆ adaptCppToCorba()
|
virtual |
Adapt a C++ input port to connect it to a CORBA output port.
- Parameters
-
inport : input port to adapt to CORBA type type type : type supported by output port
- Returns
- an adaptator port of type InputCorbaPort
Definition at line 1744 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::isAdaptableCppCorba().
◆ adaptCppToCpp()
|
virtual |
Adapt a C++ input port to a C++ output port.
- Parameters
-
inport : input port to adapt to C++ type type type : output port type
- Returns
- an adaptated input port of type InputPyPort
Definition at line 1794 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::TypeCode::isAdaptable(), and YACS::ENGINE::TypeCode::kind().
◆ adaptCppToNeutral()
|
virtual |
Adapt a C++ input port to a Neutral output port.
- Parameters
-
inport : input port to adapt to C++ type type type : output port type
- Returns
- an adaptated input port of type InputPyPort
Definition at line 1820 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::TypeCode::isAdaptable(), and YACS::ENGINE::TypeCode::kind().
◆ adaptCppToPython()
|
virtual |
Adapt a C++ input port to a Python output port.
- Parameters
-
inport : input port to adapt to Python type type type : output port type
- Returns
- an adaptated input port of type InputPyPort
Definition at line 1769 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::isAdaptableCppPyObject().
◆ adaptCppToXml()
|
virtual |
Definition at line 1840 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::isAdaptableCppXml().
◆ adaptNeutral()
|
virtual |
Adapt a Neutral input port to connect it to an output port with a given implementation.
- Parameters
-
source : Neutral input port to adapt to implementation impl and type type impl : output port implementation (C++, Python, Corba, Xml or Neutral) type : output port supported type init : if init is true the proxy port will be used in initialization of input port (needs value check)
- Returns
- the adaptated port
Definition at line 1012 of file RuntimeSALOME.cxx.
◆ adaptNeutralToCorba()
Adapt a Neutral input port to a Corba output port.
- Parameters
-
inport : Neutral input port to adapt to Corba type type type : output port type
- Returns
- an adaptated input port of type InputCorbaPort
Definition at line 905 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::TypeCode::isAdaptable().
◆ adaptNeutralToCpp()
Adapt a Neutral input port to a C++ output port.
- Parameters
-
inport : input port to adapt to C++ type type type : output port type
- Returns
- an input port of type InputCppPort
Definition at line 985 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::isAdaptableNeutralCpp().
◆ adaptNeutralToPython()
Adapt a Neutral input port to a Python output port.
- Parameters
-
inport : input port to adapt to Python type type type : output port type
- Returns
- an adaptated input port of type InputPyPort
Definition at line 930 of file RuntimeSALOME.cxx.
References YACS::ENGINE::TypeCode::contentType(), YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::TypeCode::isAdaptable(), YACS::ENGINE::TypeCode::kind(), YACS::ENGINE::Objref, and YACS::ENGINE::Sequence.
◆ adaptNeutralToXml()
Adapt a Neutral input port to a Xml output port.
- Parameters
-
inport : input port to adapt to Xml type type type : output port type
- Returns
- an input port of type InputXmlPort
Definition at line 960 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::TypeCode::isAdaptable().
◆ adaptPythonToCorba()
|
virtual |
Adapt a Python input port to a Corba output port.
Always convert the data
- Parameters
-
inport : InputPort to adapt to Corba type type type : outport data type
- Returns
- an adaptator port of Corba type (InputCorbaPort)
Definition at line 1597 of file RuntimeSALOME.cxx.
References YACS::ENGINE::Bool, YACS::ENGINE::Double, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::Int, YACS::ENGINE::isAdaptablePyObjectCorba(), YACS::ENGINE::TypeCode::kind(), YACS::ENGINE::Objref, YACS::ENGINE::Sequence, YACS::ENGINE::String, and YACS::ENGINE::Struct.
◆ adaptPythonToCpp()
|
virtual |
Adapt a Python input port to a C++ output port.
- Parameters
-
inport : InputPort to adapt to C++ type type type : outport data type
- Returns
- an adaptator port of C++ type (InputCppPort)
Definition at line 1513 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::isAdaptablePyObjectCpp().
◆ adaptPythonToNeutral()
|
virtual |
Adapt a Python input port to a Neutral data port.
- Parameters
-
inport : InputPort to adapt to Neutral type type type : outport data type
- Returns
- an adaptator port of Neutral type (Neutralxxxx)
Definition at line 1539 of file RuntimeSALOME.cxx.
References YACS::ENGINE::Bool, YACS::ENGINE::Double, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::Int, YACS::ENGINE::isAdaptablePyObjectNeutral(), YACS::ENGINE::TypeCode::kind(), YACS::ENGINE::Objref, YACS::ENGINE::Sequence, YACS::ENGINE::String, and YACS::ENGINE::Struct.
◆ adaptPythonToPython()
|
virtual |
Adapt a Python input port to a Python output port.
No need to make conversion or cast. Only check, it's possible.
- Parameters
-
inport : InputPort to adapt to Python type type type : outport data type init : if init is true the proxy port will be used in initialization of input port (needs value check)
- Returns
- an adaptator port of type InputPyPort
Definition at line 1483 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::isAdaptablePyObjectPyObject().
◆ adaptPythonToXml()
|
virtual |
Adapt a Python input port to a Xml output port.
- Parameters
-
inport : input port to adapt to Xml type type type : output port type
- Returns
- an input port of type InputXmlPort
Definition at line 1675 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::TypeCode::isAdaptable().
◆ adaptXmlToCorba()
|
virtual |
Adapt a XML input port to connect it to a CORBA output port.
- Parameters
-
inport : input port to adapt to CORBA type type type : type supported by output port
- Returns
- an adaptator port of type InputCorbaPort
Definition at line 1052 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::isAdaptableXmlCorba().
◆ adaptXmlToCpp()
|
virtual |
Adapt a XML input port to a C++ output port.
- Parameters
-
inport : input port to adapt to C++ type type type : output port type
- Returns
- an adaptated input port of type InputPyPort
Definition at line 1100 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), YACS::ENGINE::TypeCode::isAdaptable(), and YACS::ENGINE::TypeCode::kind().
◆ adaptXmlToNeutral()
|
virtual |
Adapt a XML input port to a Neutral output port.
- Parameters
-
inport : input port to adapt to Neutral type type type : output port type
- Returns
- an adaptated input port of type Neutralxxxx
Definition at line 1126 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), and YACS::ENGINE::TypeCode::isAdaptable().
◆ adaptXmlToPython()
|
virtual |
Adapt a XML input port to a Python output port.
- Parameters
-
inport : input port to adapt to Python type type type : output port type
- Returns
- an adaptated input port of type InputPyPort
Definition at line 1076 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::TypeCode::isAdaptable().
◆ adaptXmlToXml()
|
virtual |
Adapt a XML input port to a Xml output port.
- Parameters
-
inport : input port to adapt to Xml type type type : output port type init : if init is true the proxy port will be used in initialization of input port (needs value check)
- Returns
- an adaptated input port of type Xmlxxxx
Definition at line 1148 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::TypeCode::id(), and YACS::ENGINE::TypeCode::isAdaptable().
◆ convertNeutral()
Convert a YACS::ENGINE::Any object to an external object with type type.
This method is used to convert Neutral objects to script languages. For example Python language. The runtime has one external script language. The object is returned as a void * because engine knows nothing about external script language.
- Parameters
-
type the type of the converted object if the conversion is possible data the object to convert
- Returns
- the converted object
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 1969 of file RuntimeSALOME.cxx.
References YACS::ENGINE::convertNeutralPyObject().
◆ convertNeutralAsString()
Convert a YACS::ENGINE::Any object to a string to be used in GUI for example.
engine package does not provide a conversion to string. It has to be implemented in the runtime package.
- Parameters
-
type the type of the object to convert data the object to convert
- Returns
- the string representation of the object
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 1980 of file RuntimeSALOME.cxx.
References YACS::ENGINE::convertNeutralPyObject(), and YACS::ENGINE::convertPyObjectToString().
◆ convertPyObjectToString()
|
virtual |
Definition at line 2008 of file RuntimeSALOME.cxx.
References YACS::ENGINE::convertPyObjectToString().
◆ convertStringToPyObject()
|
virtual |
Definition at line 2013 of file RuntimeSALOME.cxx.
References YACS::ENGINE::newPyStdOut().
Referenced by YACS::HMI::CommandSetInPortValue::localExecute(), YACS::HMI::CommandSetOutPortValue::localExecute(), YACS::HMI::CommandSetInPortValue::localReverse(), and YACS::HMI::CommandSetOutPortValue::localReverse().
◆ createBloc()
|
virtual |
◆ createComponentInstance()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 722 of file RuntimeSALOME.cxx.
◆ createCompoNode()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 697 of file RuntimeSALOME.cxx.
◆ createContainer()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 740 of file RuntimeSALOME.cxx.
◆ createForLoop()
|
virtual |
◆ createFuncNode()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 654 of file RuntimeSALOME.cxx.
◆ createInDataNode()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 623 of file RuntimeSALOME.cxx.
◆ createInputDataStreamPort()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 812 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::TypeCode::kind(), YACS::ENGINE::Objref, and YACS::ENGINE::TypeCode::shortName().
◆ createInputPort()
|
virtual |
◆ createInterfaceTc()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 575 of file RuntimeSALOME.cxx.
◆ createOptimizerLoop()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 614 of file RuntimeSALOME.cxx.
References YACS::ENGINE::DynParaLoop::edGetNbOfBranchesPort(), and YACS::ENGINE::InputPort::edInit().
◆ createOutDataNode()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 639 of file RuntimeSALOME.cxx.
◆ createOutputDataStreamPort()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 826 of file RuntimeSALOME.cxx.
References DEBTRACE, YACS::ENGINE::TypeCode::kind(), YACS::ENGINE::Objref, and YACS::ENGINE::TypeCode::shortName().
◆ createOutputPort()
|
virtual |
Implements YACS::ENGINE::Runtime.
Definition at line 782 of file RuntimeSALOME.cxx.
◆ createProc()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 570 of file RuntimeSALOME.cxx.
Referenced by YACS::HMI::Invocator::Invocator(), and YACS::HMI::GenericGui::onNewSchema().
◆ createRefNode()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 680 of file RuntimeSALOME.cxx.
◆ createScriptNode()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 668 of file RuntimeSALOME.cxx.
◆ createSequenceTc()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 584 of file RuntimeSALOME.cxx.
◆ createSInlineNode()
|
virtual |
◆ createStructTc()
|
virtual |
Reimplemented from YACS::ENGINE::Runtime.
Definition at line 591 of file RuntimeSALOME.cxx.
◆ createWhileLoop()
|
virtual |
◆ fini()
|
virtual |
◆ get_omnipy()
| PyObject * RuntimeSALOME::get_omnipy | ( | ) |
Definition at line 1959 of file RuntimeSALOME.cxx.
◆ getApi()
| omniORBpyAPI * RuntimeSALOME::getApi | ( | ) |
Definition at line 1964 of file RuntimeSALOME.cxx.
Referenced by YACS::ENGINE::convertFromYacsObjref< PYTHONImpl, PyObject * >::convert().
◆ getBuiltins()
| PyObject * RuntimeSALOME::getBuiltins | ( | ) | const |
Definition at line 1949 of file RuntimeSALOME.cxx.
◆ getCatalogOfComputeNodes()
|
virtual |
Implements YACS::ENGINE::Runtime.
Definition at line 503 of file RuntimeSALOME.cxx.
References yacsorb.CORBAEngineTest::i, SALOME_NamingService_Wrapper::init_orb(), orb, and SALOME_NamingService_Wrapper::Resolve().
◆ getConnectionManager()
|
inline |
Definition at line 246 of file RuntimeSALOME.hxx.
◆ getDynFactory()
| DynamicAny::DynAnyFactory_ptr RuntimeSALOME::getDynFactory | ( | ) | const |
Definition at line 1954 of file RuntimeSALOME.cxx.
Referenced by YACS::ENGINE::convertToYacsStruct< CORBAImpl, CORBA::Any *, void *, IMPLOUT, TOUT >::convert(), YACS::ENGINE::convertToYacsSequence< CORBAImpl, CORBA::Any *, void *, IMPLOUT, TOUT >::convert(), YACS::ENGINE::convertFromYacsStruct< CORBAImpl, CORBA::Any * >::convert(), YACS::ENGINE::convertFromYacsSequence< CORBAImpl, CORBA::Any * >::convert(), and YACS::ENGINE::CorbaPySequence::CorbaPySequence().
◆ getFromNS()
| CORBA::Object_var RuntimeSALOME::getFromNS | ( | const char * | entry | ) | const |
Retrieve from custom NS the entry. Custom NS is supposed to be hosted in current process. This method try to emulate CORBA ns convention : "corbaname:rir:#test.my_context/Echo.Object" is converted into "Echo"
See Engines::EmbeddedNamingService
Definition at line 1920 of file RuntimeSALOME.cxx.
References yacsorb.CORBAEngineTest::i.
Referenced by YACS::ENGINE::convertFromYacsObjref< PYTHONImpl, PyObject * >::convert(), YACS::ENGINE::convertFromYacsObjref< CORBAImpl, CORBA::Any * >::convert(), and YACS::ENGINE::CORBAComponent::load().
◆ getNS()
| std::unique_ptr< SALOME_NamingService_Container_Abstract > RuntimeSALOME::getNS | ( | ) |
Definition at line 138 of file RuntimeSALOME.cxx.
◆ getOrb()
| CORBA::ORB_ptr RuntimeSALOME::getOrb | ( | ) | const |
Definition at line 1909 of file RuntimeSALOME.cxx.
Referenced by YACS::ENGINE::convertToYacsObjref< CORBAImpl, CORBA::Any *, void *, IMPLOUT, TOUT >::convert(), YACS::ENGINE::convertFromYacsStruct< CORBAImpl, CORBA::Any * >::convert(), YACS::ENGINE::convertFromYacsObjref< NEUTRALImpl, YACS::ENGINE::Any * >::convert(), YACS::ENGINE::convertFromYacsSequence< CORBAImpl, CORBA::Any * >::convert(), YACS::HMI::GenericGui::GenericGui(), YACS::ENGINE::getCorbaTCObjref(), YACS::ENGINE::getCorbaTCSequence(), YACS::ENGINE::getCorbaTCStruct(), YACS::HMI::GenericGui::getMachineList(), YACS::ENGINE::SalomeContainerTools::getResourceProperties(), YACS::HMI::BatchJobsListDialog::getSalomeLauncher(), YACS::ENGINE::InputCorbaPort::InputCorbaPort(), YACS::ENGINE::SessionCataLoader::loadCata(), main(), YACS::ENGINE::OutputCorbaPort::OutputCorbaPort(), YACS::ENGINE::InputStudyPort::putDataInStudy(), YACS::ENGINE::PyCorbaObjref::PyCorbaObjref(), shutdownServers(), and YACS::HMI::GuiExecutor::startResumeDataflow().
◆ getPyOrb()
| PyObject * RuntimeSALOME::getPyOrb | ( | ) | const |
Definition at line 1944 of file RuntimeSALOME.cxx.
Referenced by YACS::ENGINE::PyCorbaObjref::PyCorbaObjref().
◆ getSingleton()
|
inlinestaticprivate |
◆ getVersion()
|
virtual |
Definition at line 561 of file RuntimeSALOME.cxx.
◆ init()
|
virtual |
CORBA and Python initialization.
- Parameters
-
flags contains several bits bit0 (ispyext) true when method is called from Python (Python initialization must not be done!) bit1 (UsePython) true if python nodes are needed bit1 (UseCorba) true if CORBA nodes are needed bit1 (UseXml) true if python nodes are needed bit1 (UseCpp) true if C++ nodes are needed bit1 (UseSalome) true if Salome nodes are needed argc number of command line arguments (used to initialize the Python interpreter) argv command line arguments (used to initialize the Python interpreter)
Definition at line 280 of file RuntimeSALOME.cxx.
References driver_internal::args, DEBTRACE, yacsorb.CORBAEngineTest::i, and Py_DecodeLocale().
◆ initBuiltins()
|
protected |
Definition at line 170 of file RuntimeSALOME.cxx.
References gui.Appli::t.
◆ launchSubProcess()
| PyObject * RuntimeSALOME::launchSubProcess | ( | const std::vector< std::string > & | cmds | ) |
Definition at line 471 of file RuntimeSALOME.cxx.
References yacsorb.CORBAEngineTest::i, and YACS::Exception::what().
◆ loadModulCatalog()
| void RuntimeSALOME::loadModulCatalog | ( | ) |
◆ setRuntime()
|
static |
Definition at line 144 of file RuntimeSALOME.cxx.
References DEBTRACE, and testCppPluginInvokation::r.
Referenced by driverTest(), YACS::HMI::GenericGui::GenericGui(), and main().
Friends And Related Function Documentation
◆ getSALOMERuntime
|
friend |
Member Data Documentation
◆ _api
|
protected |
Definition at line 256 of file RuntimeSALOME.hxx.
◆ _bltins
|
protected |
Definition at line 254 of file RuntimeSALOME.hxx.
◆ _connectionManager
|
private |
Definition at line 262 of file RuntimeSALOME.hxx.
◆ _dynFactory
|
protected |
Definition at line 255 of file RuntimeSALOME.hxx.
◆ _flags
|
protected |
Definition at line 258 of file RuntimeSALOME.hxx.
◆ _omnipy
|
protected |
Definition at line 257 of file RuntimeSALOME.hxx.
◆ _orb
|
protected |
Definition at line 252 of file RuntimeSALOME.hxx.
◆ _pyorb
|
protected |
Definition at line 253 of file RuntimeSALOME.hxx.
◆ _useCorba
|
protected |
Definition at line 259 of file RuntimeSALOME.hxx.
◆ _useCpp
|
protected |
Definition at line 259 of file RuntimeSALOME.hxx.
◆ _usePython
|
protected |
Definition at line 259 of file RuntimeSALOME.hxx.
◆ _useXml
|
protected |
Definition at line 259 of file RuntimeSALOME.hxx.
◆
| enum { ... } YACS::ENGINE::RuntimeSALOME::FLAGS |
The documentation for this class was generated from the following files:
- src/runtime/RuntimeSALOME.hxx
- src/runtime/RuntimeSALOME.cxx